aiMotive Dataset: A Multimodal Dataset for Robust Autonomous Driving with Long-Range Perception (arxiv 2022/11)
Summary
Sensor

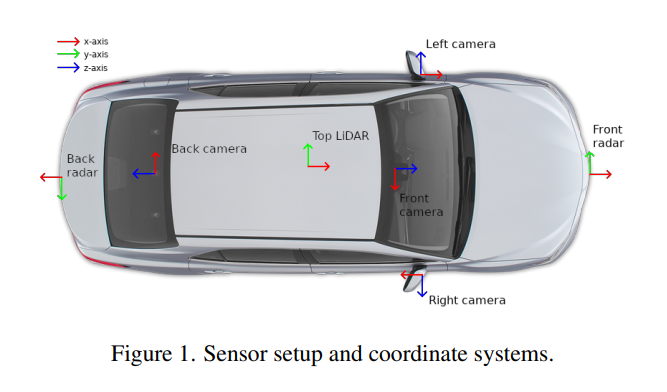
- 64-beam top LiDAR
- 1x LiDAR Spinning, 64 beams, 10Hz capture frequency, 360◦ horizontal FOV, +15◦ to -25◦, vertical FOV, ≤ 200m range, ± 2 cm accuracy, up to 1.15 Million Points per Second
- Hesai Pandar64
- 4 cameras
- 2 (前後)pinhole: 30 to 40 Hz capture frequency, 1/1.55” CMOS sensor of 2896 × 1876 resolution
- 2 (左右)fisheye: 30 to 60 Hz capture frequency, 1/2.7” CMOS sensor of 1920 × 1080 resolution
- 2 long-range radars
- 77GHz Radar
- 18 Hz capture frequency, -16° to +16° azimuth FOV, -7.5 to +7.5 elevation FOV, up to 175m distance, velocity accuracy of ±0.1 m/s
- UMRR11
- GNSS+INS
- up to 100 Hz measurement frequency, position accuracy of 100 mm (PPK), heading accuracy of 0.044◦, roll&pitch accuracy of 0.009◦
- mapは入っていないっぽい
Method
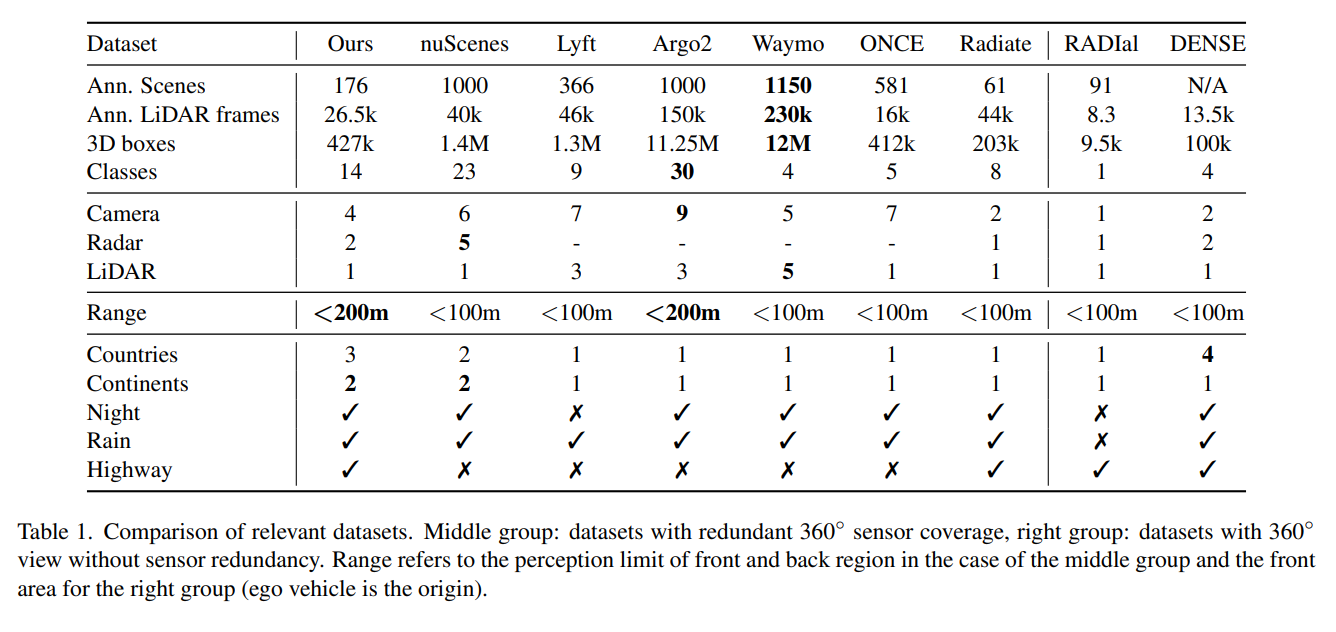
- Data
- California(US) , Austria, Hungary
- LiDAR: VoxelNet
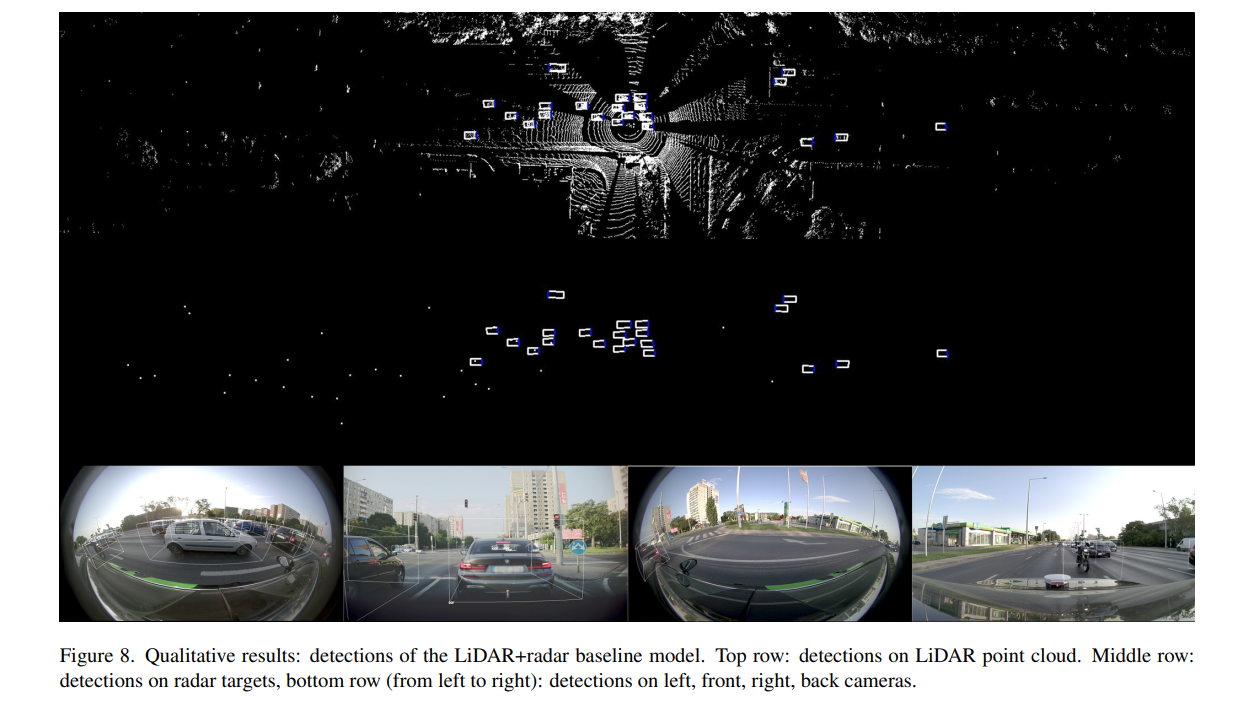
- radarはLIDARの点としてconcatして扱っている
- Camera: BEVDepth
- BEVFusion: multimodal models
Experiment
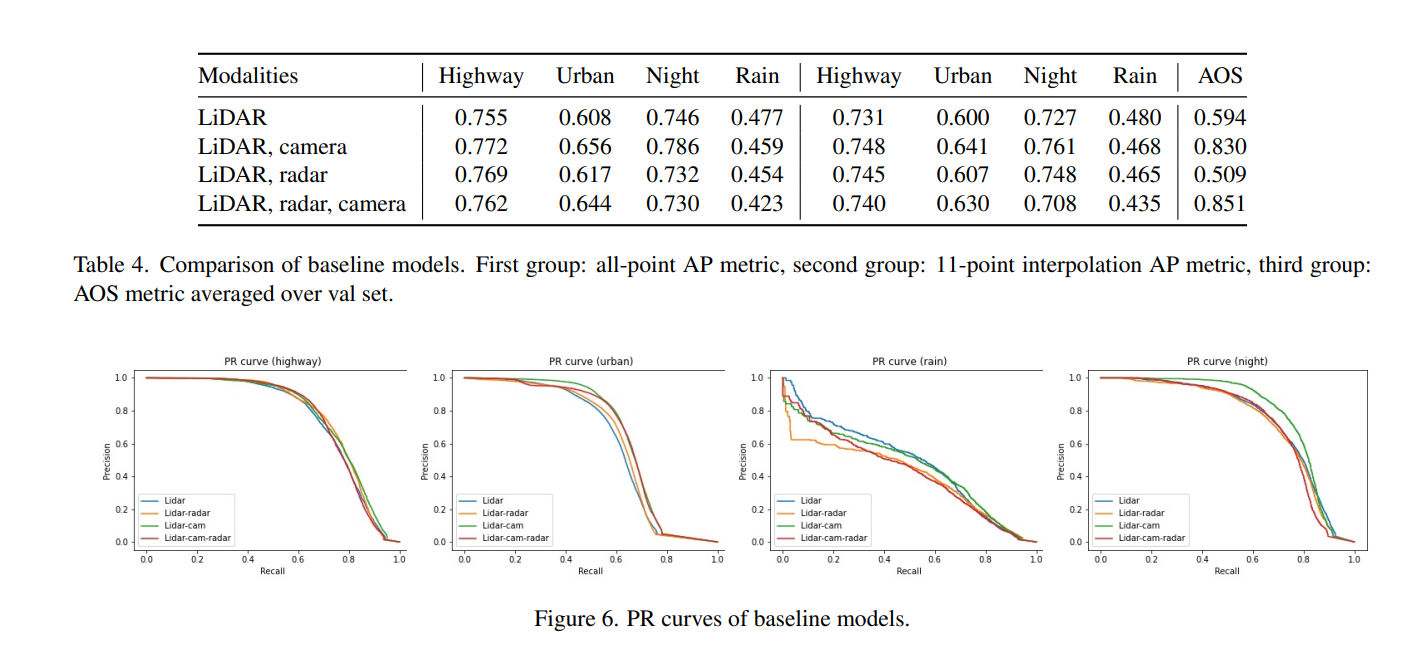
- Cameraでorientationを獲得している