Summary
無人航空機を用いた物流の自動化の研究は近年盛んに行われているが,無人航空機に配達する荷物を積載するタスクの自動化については未だ十分に行われていない.
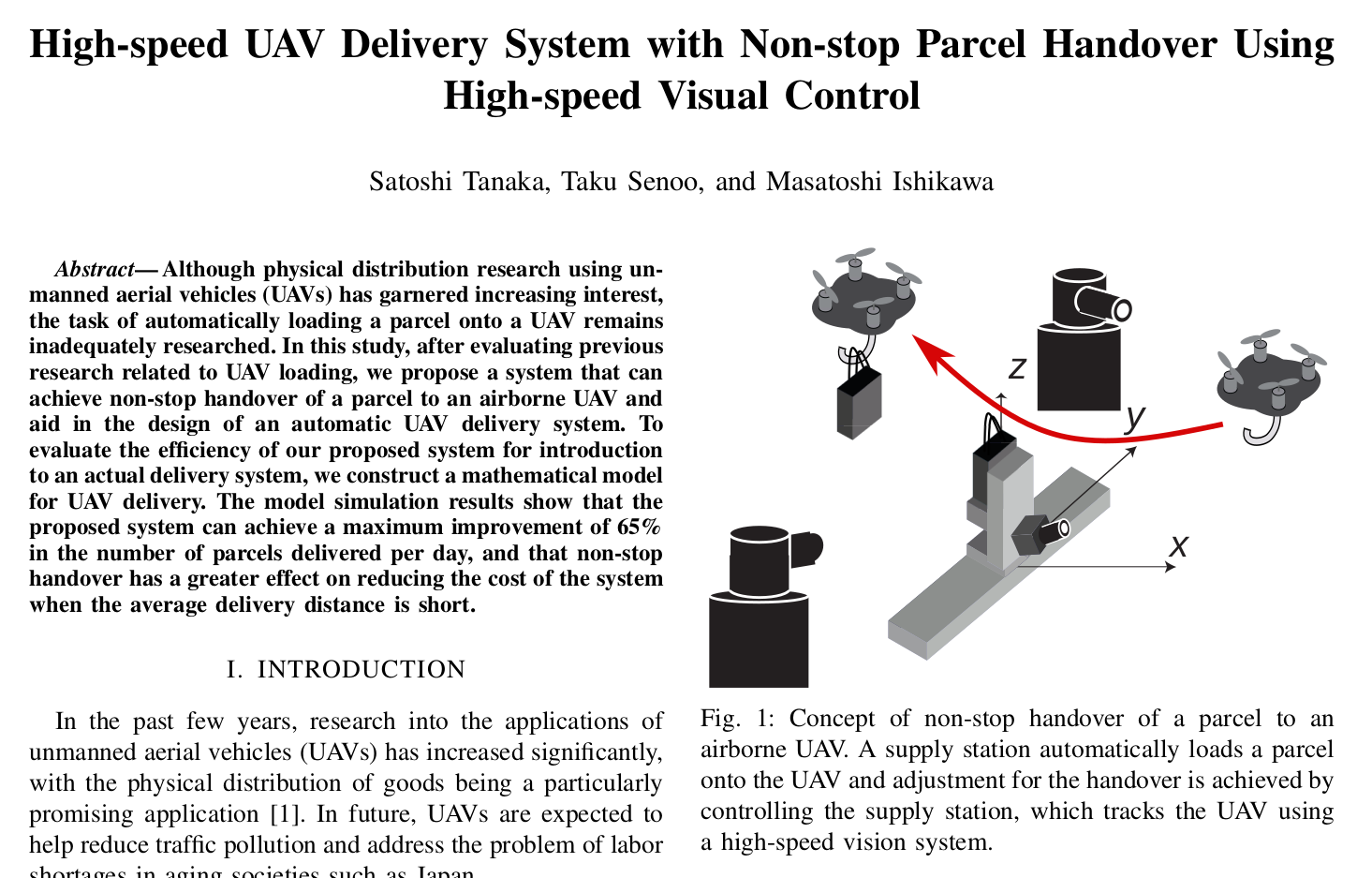
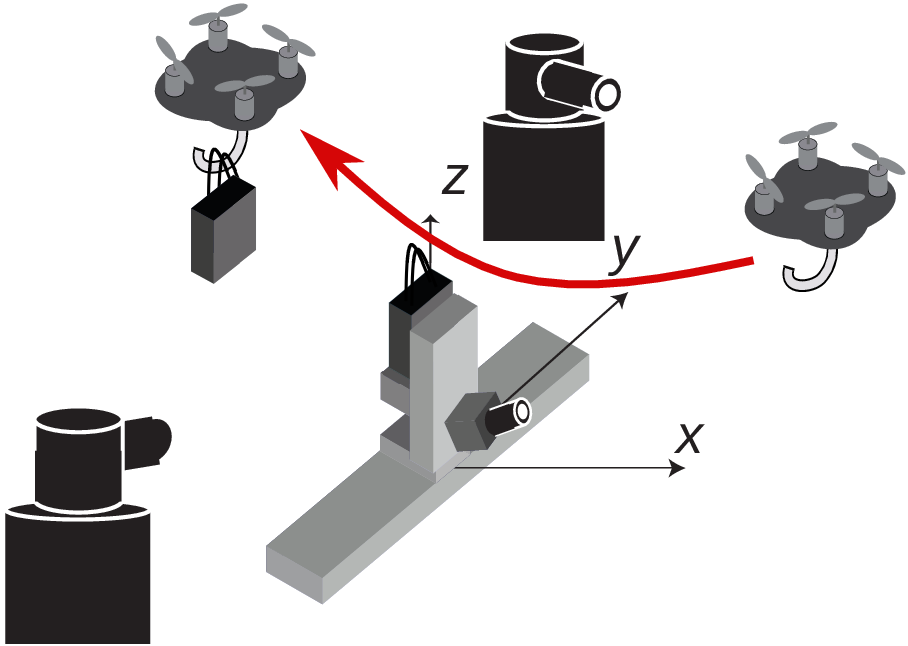
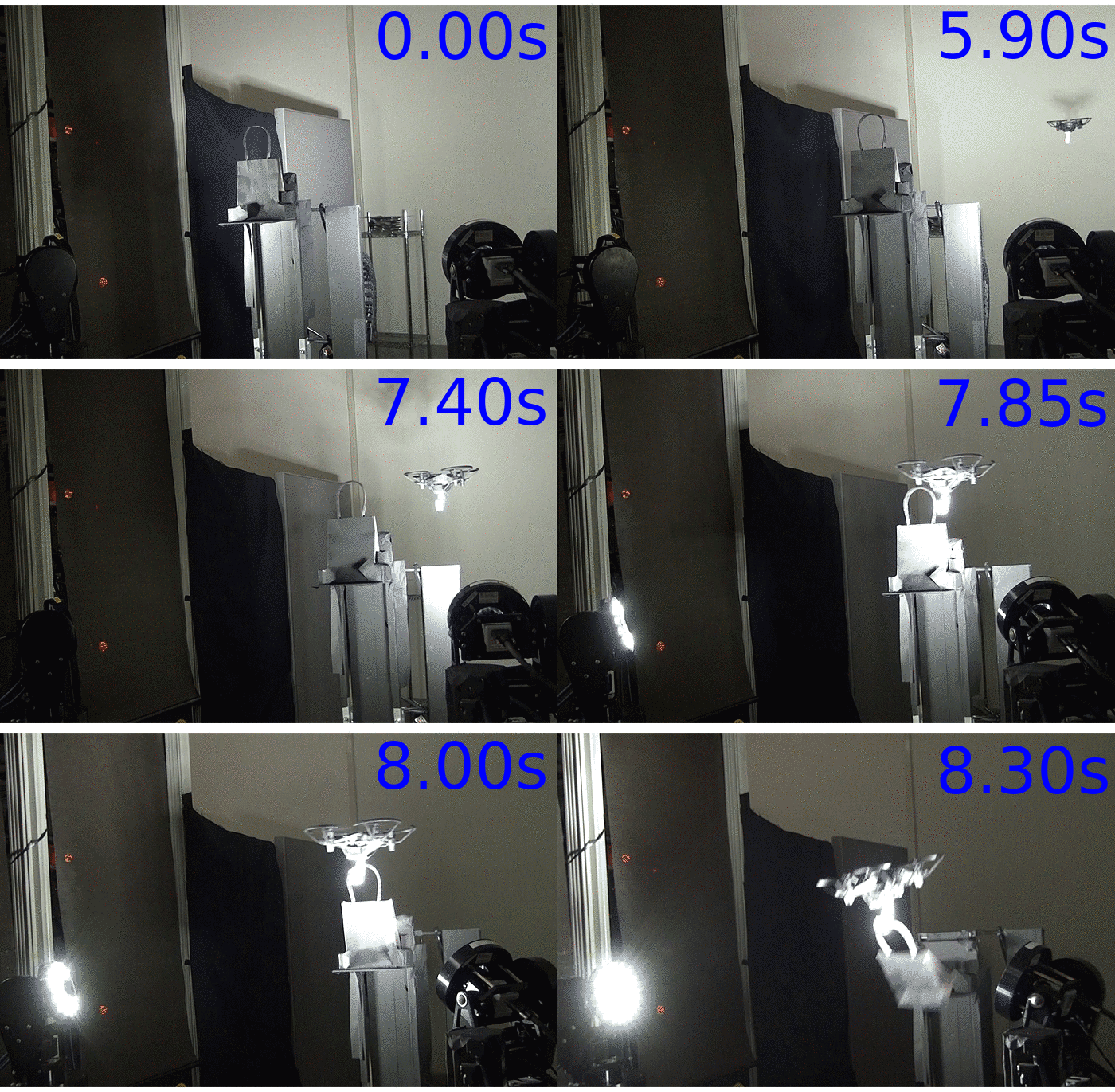
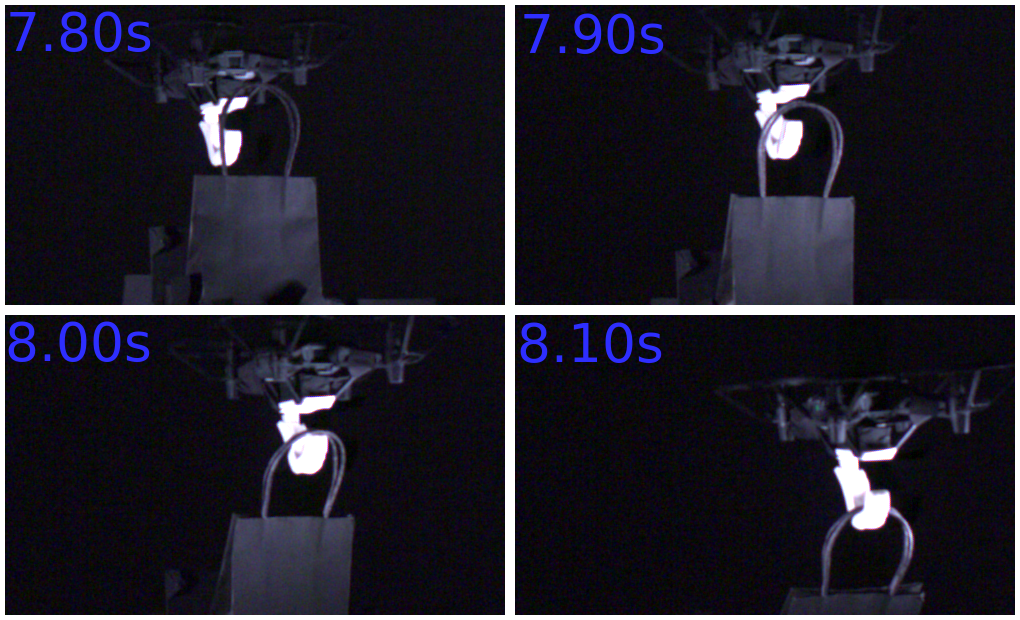
本研究では無人航空機による自動荷物配達システムとして物流の高速化を目指し, 飛行中の無人航空機に荷物を載せるコンセプトを提案し,荷物の供給基地の開発を行った. 荷物の受け渡しタスクを成功させるために,フレームレートの異なるカメラを用いて遠距離からトラッキング可能な高速アクティブビジョンシステムを構築し,遠方から近づいてくる無人航空機に対して位置追従することを想定して,トラッキング対象物に対して2軸アクチュエータで高速に位置合わせを行うシステムを構築した. 自動の無人航空機への荷物受け渡しタスクの実験を行い,1m/sで飛行中の無人航空機に荷物を受け渡すことに成功した.
- Concept of non-stop handover of a parcel to an airborne UAV
- Experiment
Reference
- Satoshi Tanaka, Taku Senoo, and Masatoshi Ishikawa: Non-Stop Handover of Parcel to Airborne UAV Based on High-Speed Visual Object Tracking, 2019 19th International Conference on Advanced Robotics (ICAR) (Belo Horizonte, 2019.12.03), Proceedings, pp. 414-419.
- Satoshi Tanaka, Taku Senoo, and Masatoshi Ishikawa: High-speed UAV Delivery System with Non-Stop Parcel Handover Using High-speed Visual Control, 2019 IEEE Intelligent Transportation Systems Conference (ITSC19) (Auckland, 2019.10.30), Proceedings, pp. 4449-4455.
- 田中 敬,妹尾 拓,石川 正俊: 高速ビジョンシステムを用いたUAVヘの荷物受け渡しシステムの開発,ロボティクス・メカトロニクス講演会2019(ROBOMECH2019),講演論文集,2P2-I06,2019.
- 田中 敬,妹尾 拓,石川 正俊: 高速アクティブビジョンを用いたマルチカメラトラッキングシステム,第19回計測自動制御学会システムインテグレーション部門講演会(SI2018)講演論文集,pp. 3002 - 3005 ,2018.