Summary
- http://ishikawa-vision.org/fusion/Magslider/index-j.html における成果
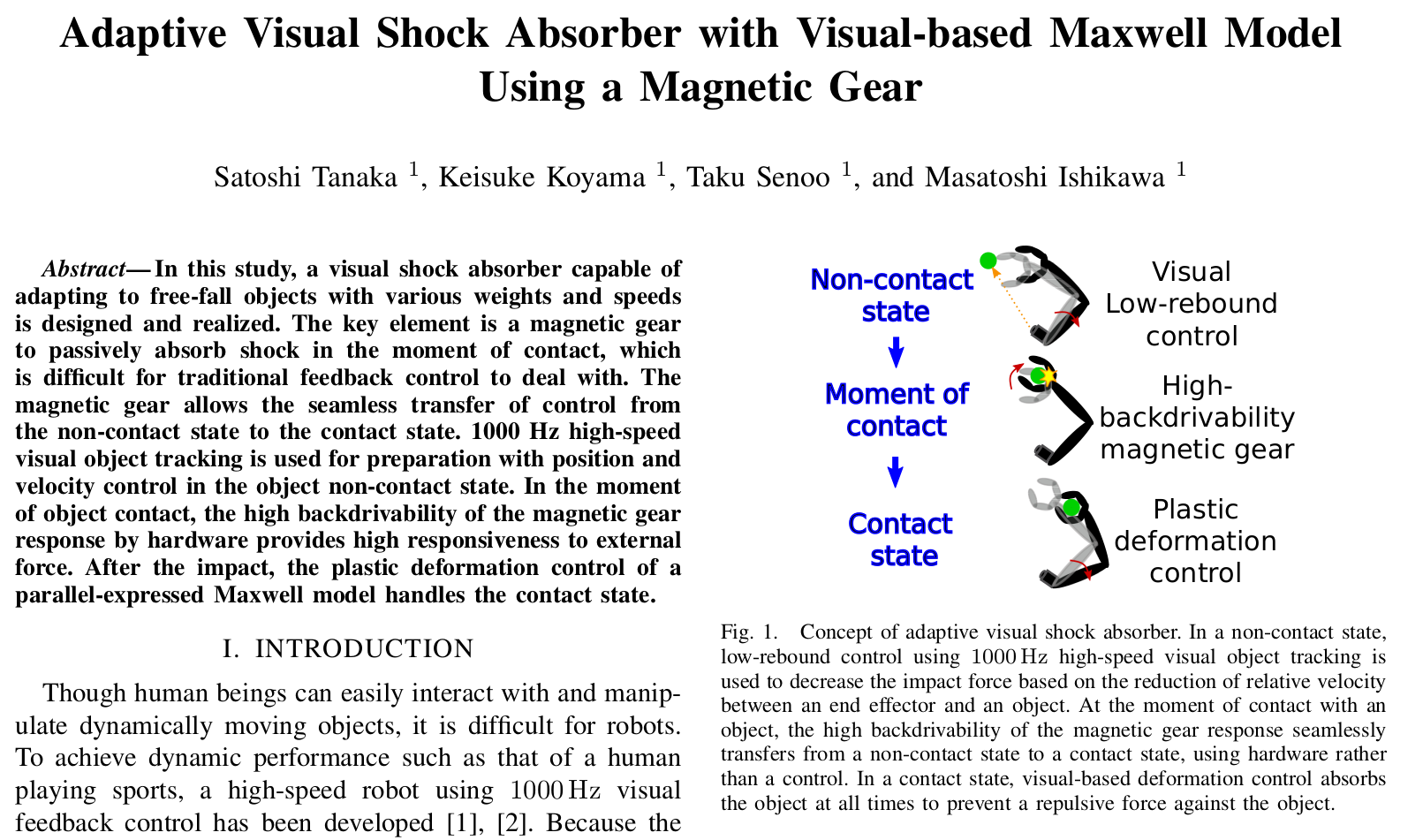
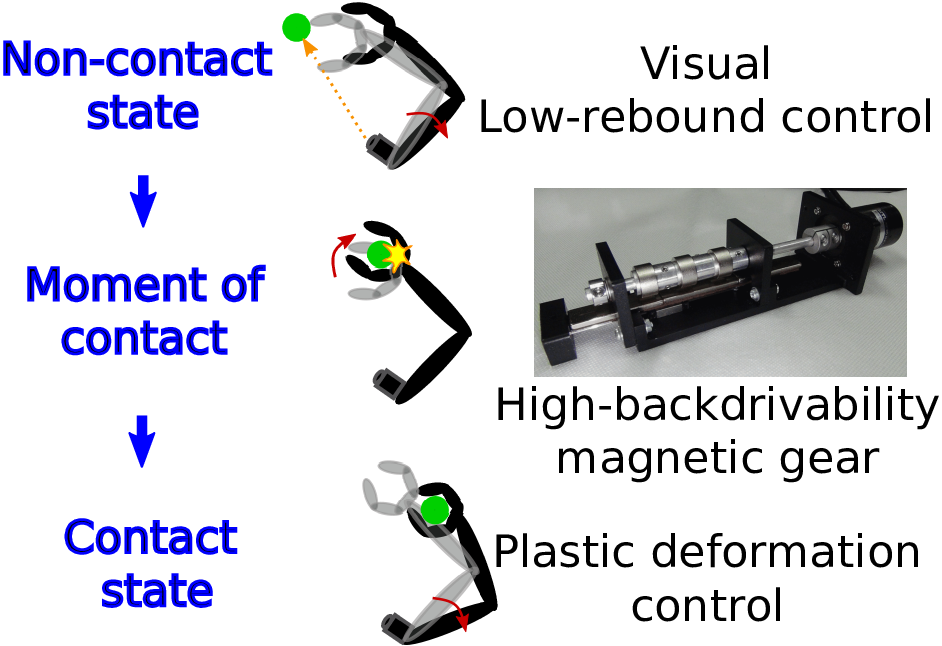
- concept
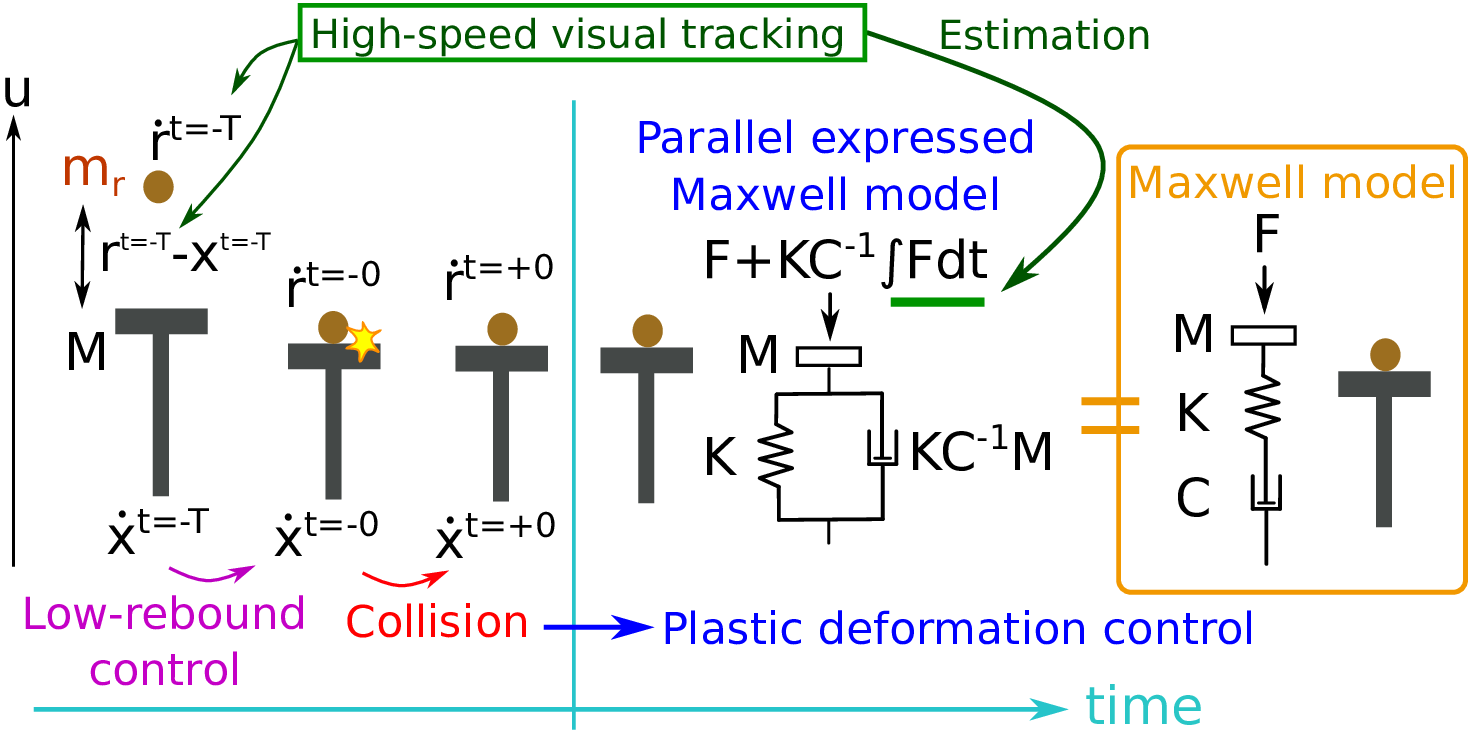
- control strategy
本研究ではしなやかな制御を目指して、磁石歯車を用いた直動機構"Magslider"による高速衝撃吸収制御を開発した。 開発したシステムは以下の3つの要素から成る。
- objectとの非接触状態における、1000Hz高速ビジョンシステムを用いた低反発制御
- objectとの接触瞬間を扱う、バックドライバビリティの大きい磁石歯車を用いた直動アクチュエータ
- objectとの接触状態における、Visual-baseで並列表現のMaxwellモデル塑性変形制御
1000Hz高速ビジョンシステムを用いた低反発制御
1000Hz高速ビジョンシステムを用いて、オブジェクトの位置と速度を計測し、アクチュエータの位置速度制御を行う。 衝撃の前に準備動作の制御を行うことで、オブジェクトの反発を抑制する。
磁石歯車を用いた直動アクチュエータ
磁気歯車は接触瞬間に発生する衝撃を受動的に吸収する。 従来のフィードバック制御では対応できない接触瞬間に発生する衝撃を、ハードウェアにおいて対処する。 磁気歯車により、非接触状態から接触状態へシームレスに制御を移行する。 本研究では、磁気歯車を用いた直動機構である"Magslider"を設計した。
Visual-baseで並列表現のMaxwellモデル塑性変形制御
1000Hz高速ビジョンシステムによる衝撃力積項の推定を用いた、並列表現のMaxwellモデル塑性変形制御を開発した。 Maxwellモデルは反発の抑制をロボットの塑性変形と捉えることで,従来のインピーダンス制御とは異なり元の変位の位置へ戻る反発力は常に発生しないため、衝撃をいなすような挙動が可能となる。 また並列に表現されたMaxwellモデルは、ばねとダンパーを直列に接続するMaxwellモデルから粘性項の変換と、外力の積分項が追加によって等価変換できる。
Reference
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, and Masatoshi Ishikawa: Adaptive Visual Shock Absorber with Visual-based Maxwell Model Using Magnetic Gear, The 2020 International Conference on Robotics and Automation (ICRA2020) (Paris, 2020.06.02), Proceedings, pp. 6163-6168.
- 田中 敬,小山 佳祐,妹尾 拓,石川 正俊:高速・低摩擦・トルクリミッタ付き小型直動機構Magsliderの開発,第20回計測自動制御学会システムインテグレーション部門講演会(SI2019),講演論文集,pp. 2572 - 2574,2019. [2019年 計測自動制御学会 システムインテグレーション部門 SI2019 優秀講演賞]