Summary
- Worked on TIER IV, Inc.
- We developed software frameworks from training to deploy for autonomous driving as OSS projects.
AWML: An Open-Source ML-based Robotics Perception Framework to Deploy for ROS-based Autonomous Driving Software
- Repository: https://github.com/tier4/AWML
- arXiv paper: https://arxiv.org/abs/2506.00645
- This paper write the whole design of AWML.

In this paper, we introduce AWML, a framework designed to support MLOps for robotics. AWML provides a machine learning infrastructure for autonomous driving, supporting not only the deployment of trained models to robotic systems, but also an active learning pipeline that incorporates auto-labeling, semi-auto-labeling, and data mining techniques. We explain the whole design of software and strategy for robotics MLOps and show the benchmark our models on our datasets.
Domain Adaptation for Different Sensor Configurations in 3D Object Detection
- arXiv paper: https://arxiv.org/abs/2506.00645
- This paper write the domain adaptation strategy for different sensor configurations.
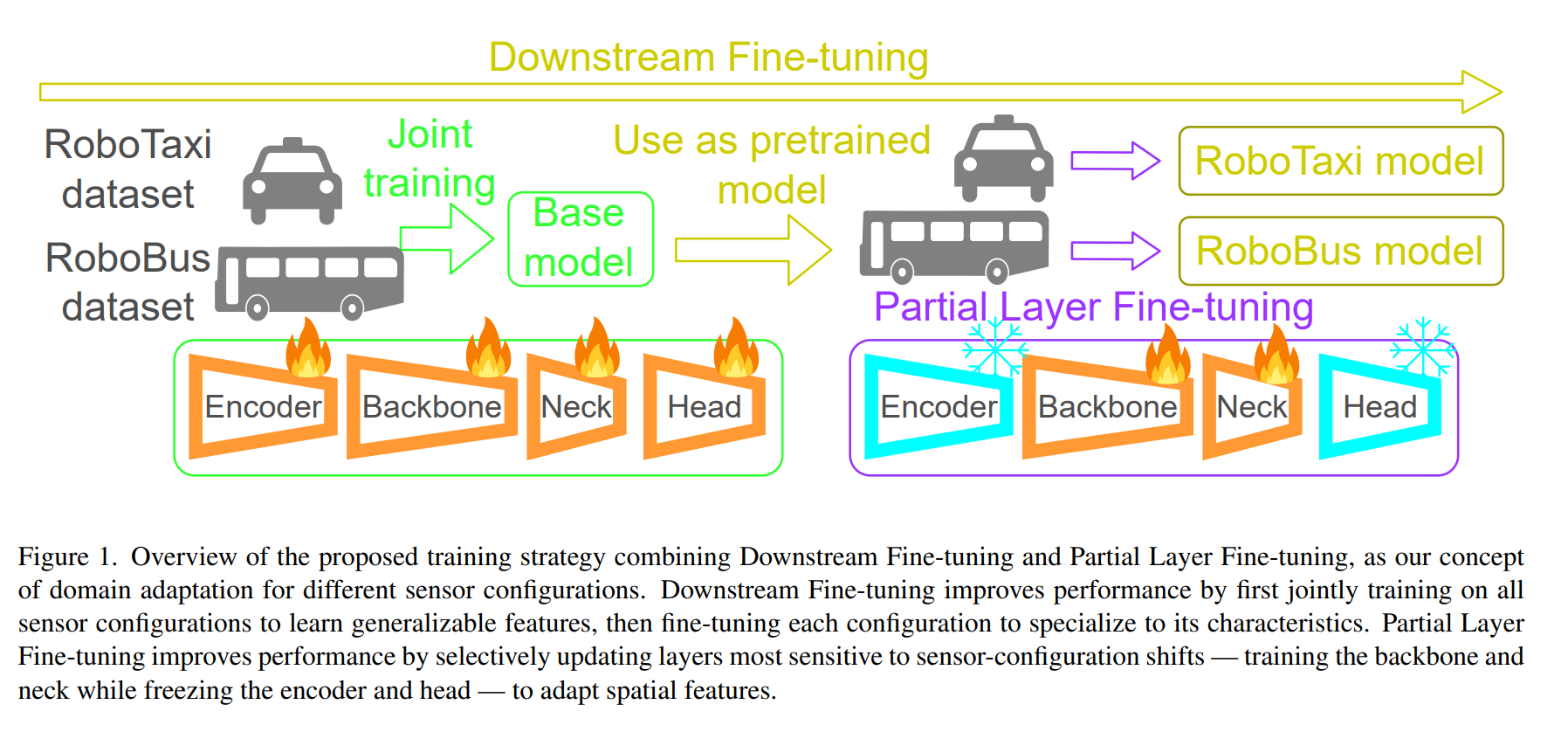
Recent advances in autonomous driving have underscored the importance of accurate 3D object detection, with LiDAR playing a central role due to its robustness under diverse visibility conditions. However, different vehicle platforms often deploy distinct sensor configurations, causing performance degradation when models trained on one configuration are applied to another because of shifts in the point cloud distribution. Prior work on multi-dataset training and domain adaptation for 3D object detection has largely addressed environmental domain gaps and density variation within a single LiDAR; in contrast, the domain gap for different sensor configurations remains largely unexplored. In this work, we address domain adaptation across different sensor configurations in 3D object detection. We propose two techniques: Downstream Fine-tuning (dataset-specific fine-tuning after multi-dataset training) and Partial Layer Fine-tuning (updating only a subset of layers to improve cross-configuration generalization). Using paired datasets collected in the same geographic region with multiple sensor configurations, we show that joint training with Downstream Fine-tuning and Partial Layer Fine-tuning consistently outperforms naive joint training for each configuration. Our findings provide a practical and scalable solution for adapting 3D object detection models to the diverse vehicle platforms.