Biography
Profile
- 田中 敬(たなか さとし)
- X: @scepter914
- Github: @scepter914
- Linkedin: @scepter914
Work Experience
- 2025/08- フリーランスエンジニア
- 2020/04-2025/07 株式会社ティアフォー Autonomous Driving Sensing/Perception Engineer
- Internship
- 2018/04-2019/03 Preferred Networks Part-time Engineer
- 2017/08-2018/03 株式会社日立製作所 研究補助員
Academic Background
- 2018/04-2020/03 東京大学大学院 修士課程
- 情報理工学研究科 創造情報学専攻(石川妹尾研究室)
- 2014/04-2018/03 東京大学
- 教養学部理科1類 → 工学部精密工学科(神保小谷研究室)
Interest
- Robotics, Computer Vision, Control theory
- 人間より器用かつ速く物理世界とインタラクションする自動ロボットシステムの構築
- Real-time 3D object detection
- 高速かつ柔らかい挙動ができる機構開発
- ダイナミックなマニピュレーションを実現する力制御
- その他趣味
Publication
英文発表は https://scepter914.github.io/ に記載
国内学会
- 田中 敬,小山 佳祐,妹尾 拓,石川 正俊:高速・低摩擦・トルクリミッタ付き小型直動機構Magsliderの開発,第20回計測自動制御学会システムインテグレーション部門講演会(SI2019),講演論文集,pp. 2572 - 2574,2019. [2019年 計測自動制御学会 システムインテグレーション部門 SI2019 優秀講演賞]
- 田中 敬,妹尾 拓,石川 正俊: 高速ビジョンシステムを用いたUAVヘの荷物受け渡しシステムの開発,ロボティクス・メカトロニクス講演会2019(ROBOMECH2019),講演論文集,2P2-I06,2019.
- 田中 敬,妹尾 拓,石川 正俊: 高速アクティブビジョンを用いたマルチカメラトラッキングシステム,第19回計測自動制御学会システムインテグレーション部門講演会(SI2018)講演論文集,pp. 3002 - 3005 ,2018.
- 田中 敬,小林 由弥,小谷 潔,神保 泰彦: 環境情報と複合現実を組み込んだBrain-Computer Interfaceの構築 電気学会医用・生体工学研究会,MBE-18-024,2018.
受賞・奨学金関係
- 2020年 IEEE Robotics and Automation Society Japan Joint Chapter Young Award
- 2019年 計測自動制御学会 システムインテグレーション部門 SI2019 優秀講演賞
- 2019/04-2020/03 (1年間) トヨタ・ドワンゴ高度人工知能人材奨学金 採択
- 2018/04-2019/03 (1年間) トヨタ・ドワンゴ高度人工知能人材奨学金 採択
- 2016/04-2018/03 (2年間) 里見奨学会奨学金 採択
Article
- ROBOMECH 2019 参加報告 2019.06.25
Project
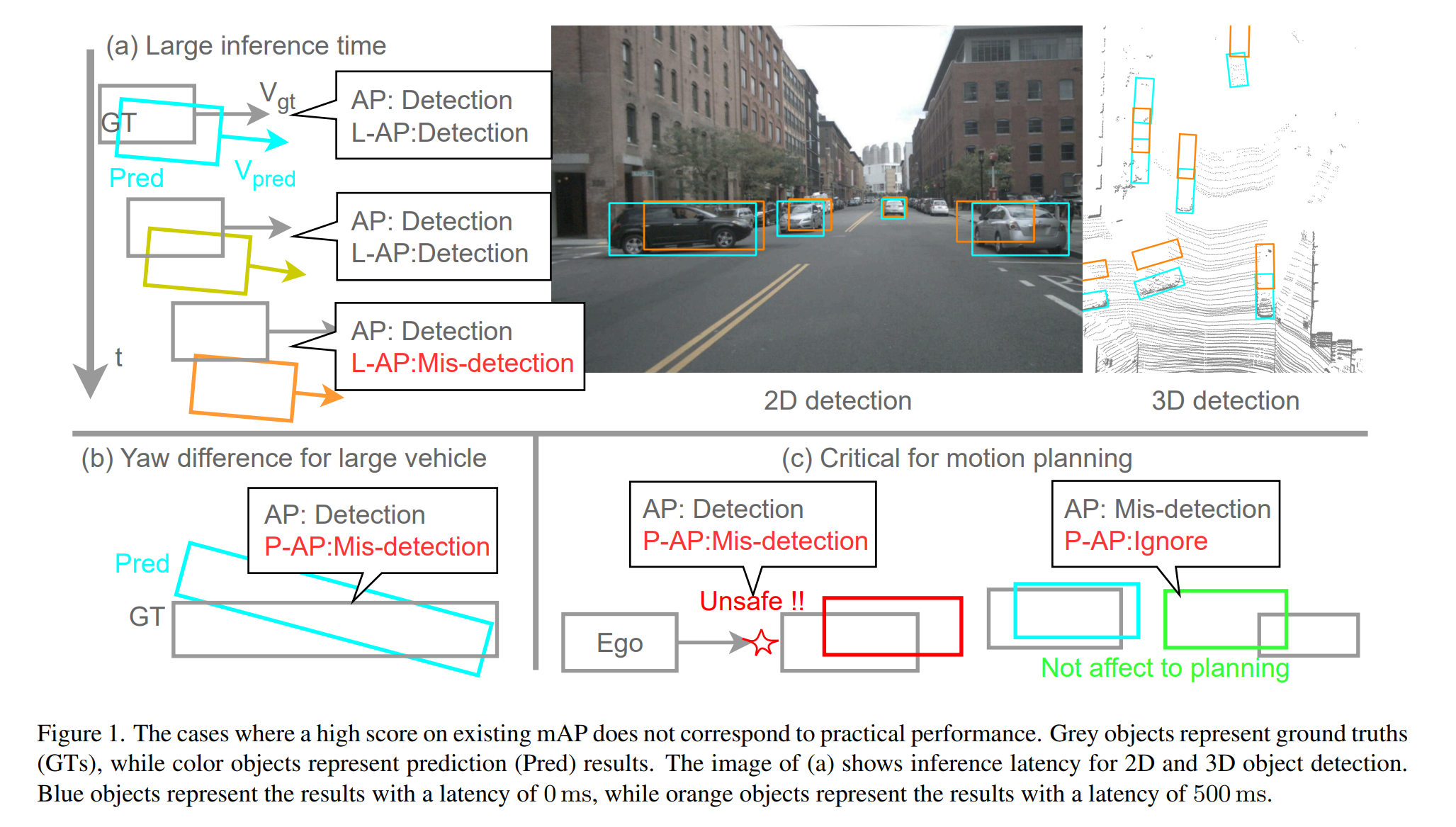
【研究】 Rethink 3D Object Detection from Physical World
- https://arxiv.org/abs/2507.00190
- Real-time 3D object detection に向けた、新しい評価指標の提案
AWML
- https://github.com/tier4/AWML
- ROSベースの自律走行ソフトウェア向けに、オープンソースの機械学習ベースのロボティクス認識フレームワークを開発

DepthAnything-ROS
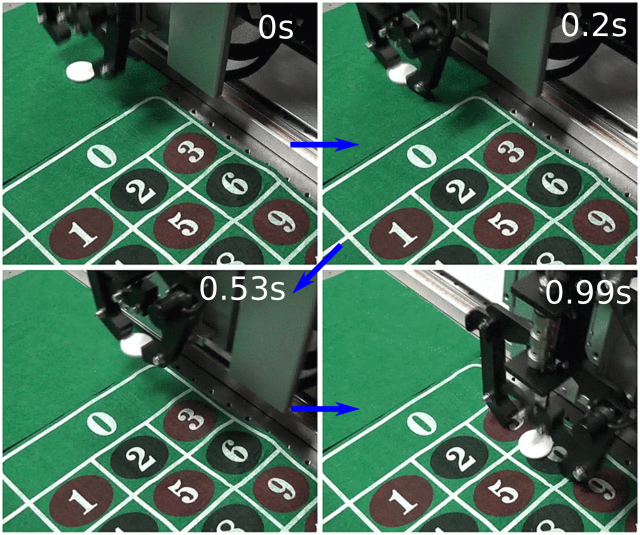
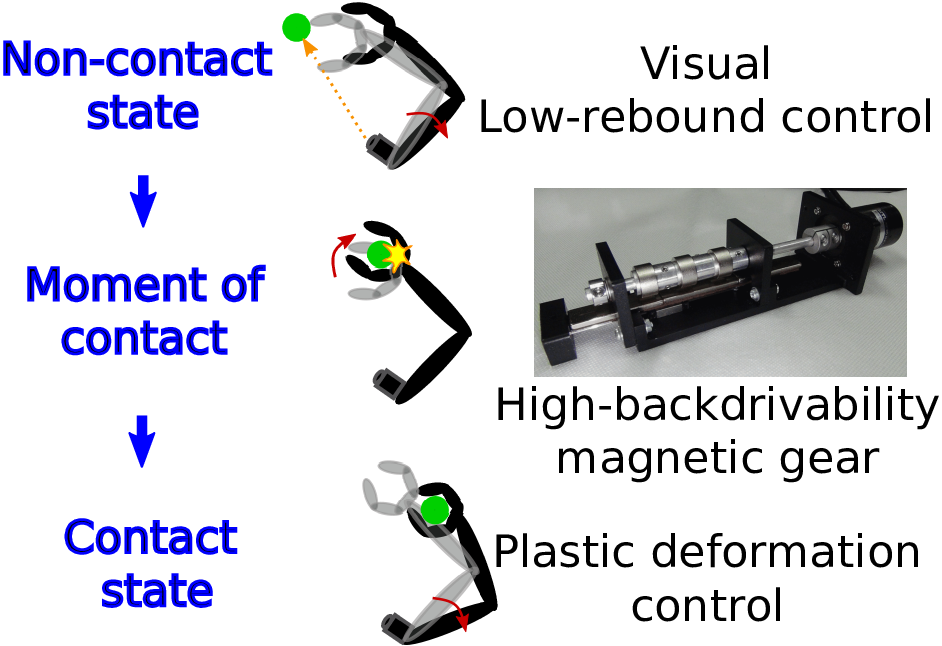
【研究】磁石歯車グリッパ"Magripper"による高速グラスピング
- 磁石歯車グリッパ"Magripper"を用いた、衝突を伴う高速グラスピングの研究
- Accepted at IROS2020 [2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award]
【研究】磁石歯車スライダ"Magslider"による高速衝撃吸収制御
- 高速画像処理、磁石歯車スライダ"Magslider"、力制御を用いた高速衝撃吸収制御の研究
- Accepted at ICRA2020
【研究】無人航空機ヘの高速荷物受け渡しシステムの開発
- 無人航空機ヘの高速荷物受け渡しシステムの研究
- Accepted at ITSC2019
ロボットコンテスト

その他
- mmCarrot
- 【研究】LaneFusion: 地図を用いた3d detection
- HD mapを使った3D object detection
- Accepted at IV2022
- CAD用マウス
- Maker Faire Tokyo 2017 出展, GUGEN2017 出展
- Youtube link