Summary
- TIER IV, Inc. における成果
- 自動運転の訓練から運用まで対応するソフトウェア基盤を、OSSとして開発
AWML: An Open-Source ML-based Robotics Perception Framework to Deploy for ROS-based Autonomous Driving Software
- Repository: https://github.com/tier4/AWML
- arXiv paper: https://arxiv.org/abs/2506.00645
- AWMLの全体設計について

ロボティクス分野におけるMLOpsを支援するフレームワーク「AWML」を開発。 自律走行向けの機械学習インフラとして、モデルのデプロイ機能に加え、auto labeling, semi-auto labeling, data-miningを組み込んだactive learningのパイプラインを構築。 ソフトウェア全体の設計と運用戦略を策定し、自社データセットを用いたモデルのベンチマーク評価を実施した。
Domain Adaptation for Different Sensor Configurations in 3D Object Detection
- arXiv paper: https://arxiv.org/abs/2506.00645
- 異なるセンサへのドメインアダプテーションに関する実験
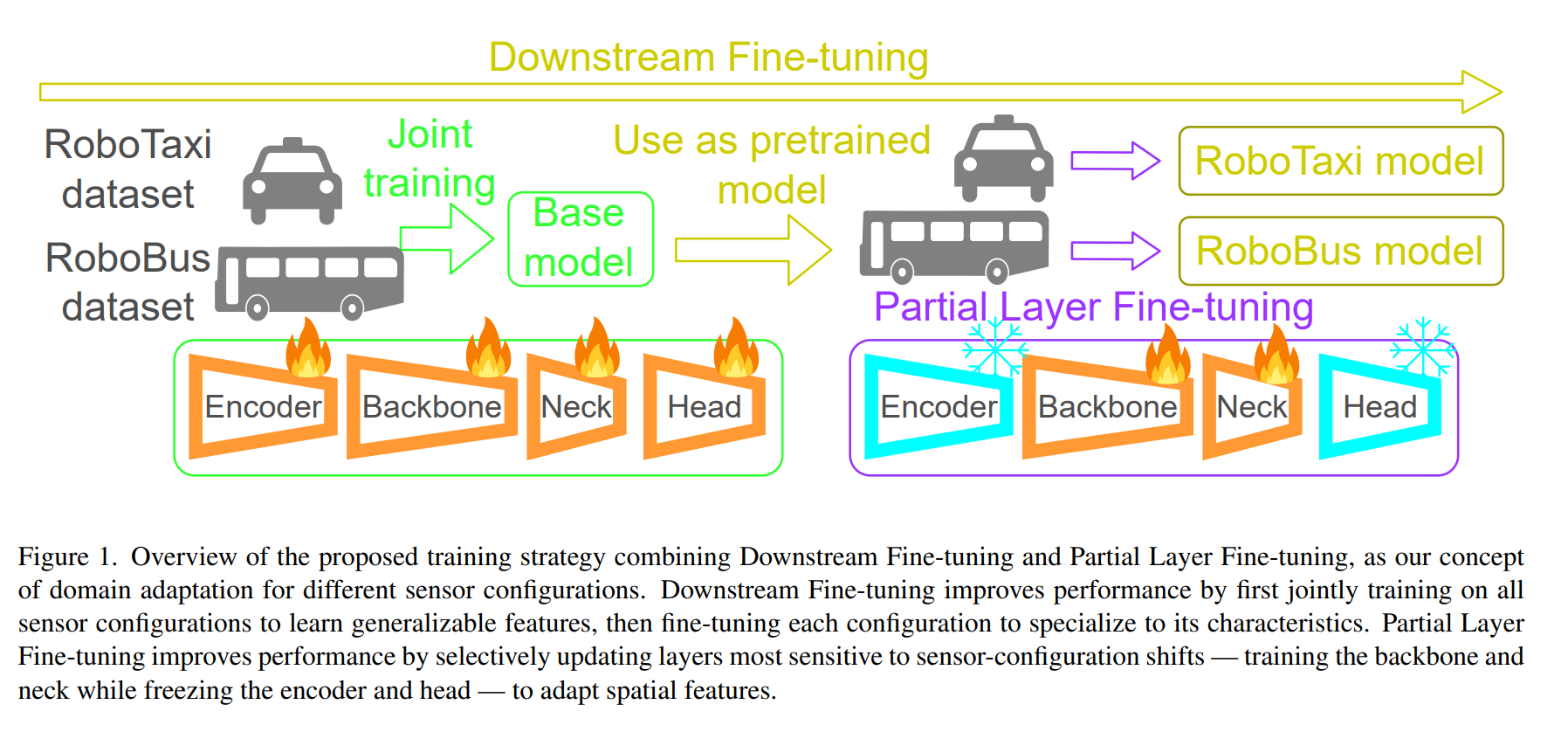
本研究では異なるセンサ構成間にまたがる3D物体検出のドメイン適応に取り組み、Downstream Fine-tuning(マルチデータセット学習後のデータセット固有の微調整)と、Partial Layer Fine-tuning(一部の層のみを更新して構成間の汎化を高める)を提案した。 同一の地理領域で複数のセンサ構成により収集したペアデータセットを用いて、これらを組み合わせた共同学習は、各構成に対する素朴な共同学習を一貫して上回ることを示し、多様な車両プラットフォームへ3D物体検出モデルを適応させるうえで実用的かつスケーラブルな解決策を提供している。