
Summary
concept
- Researched at TIER IV, Inc.
- concept
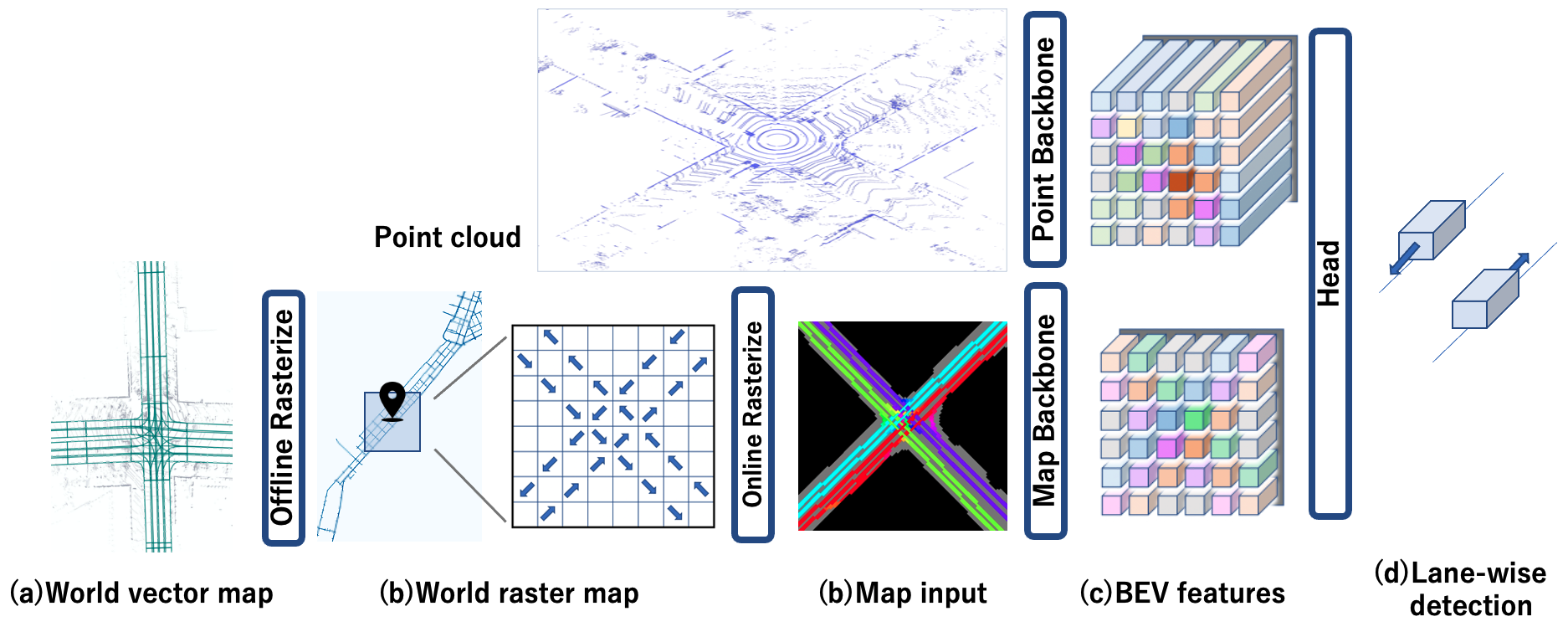
本研究では、Objectの反対方向への推測を抑えることを目的とした、LiDARとベクターマップを使用した3D detection、“LaneFusion” を開発した。
Method
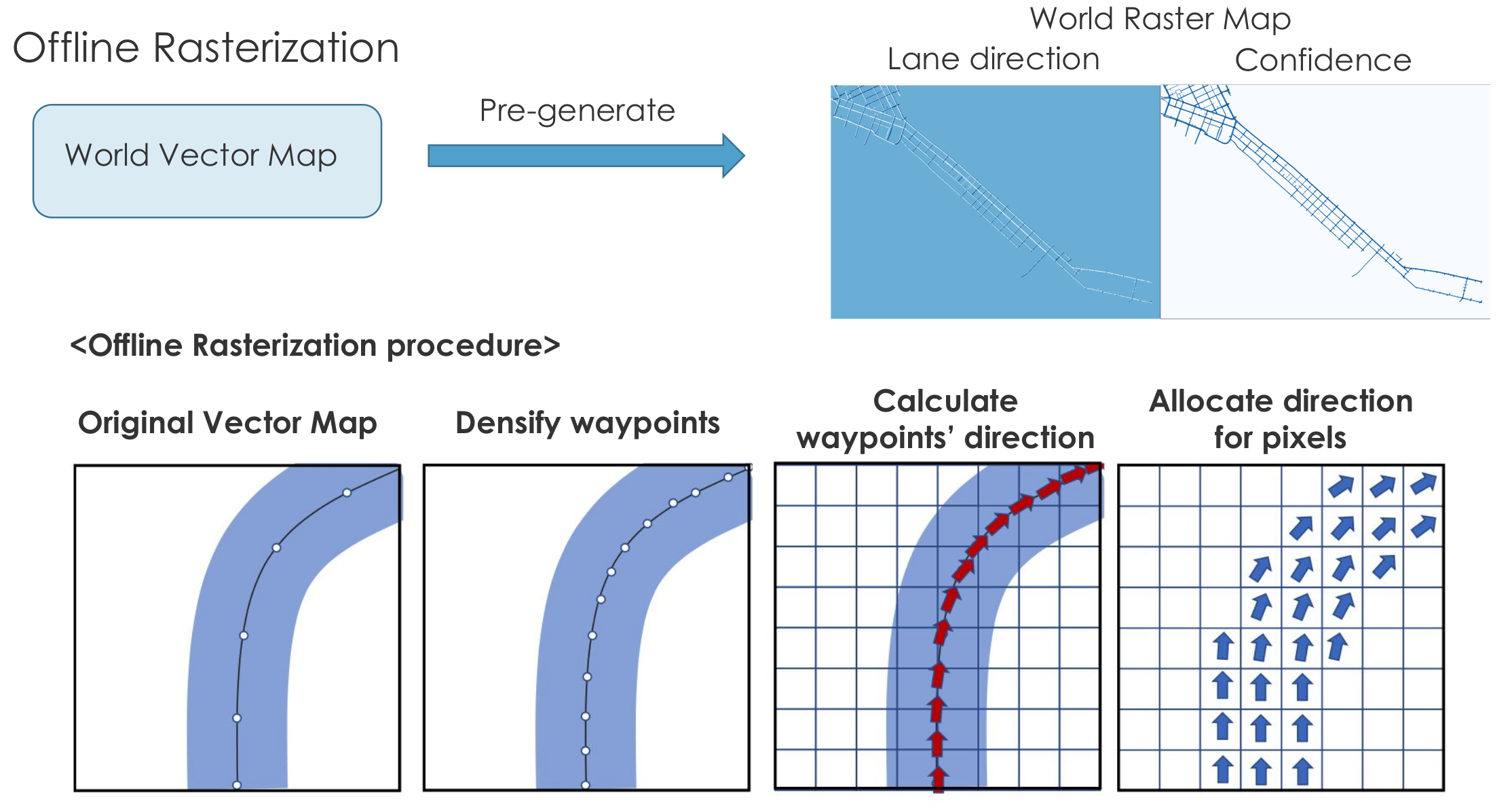
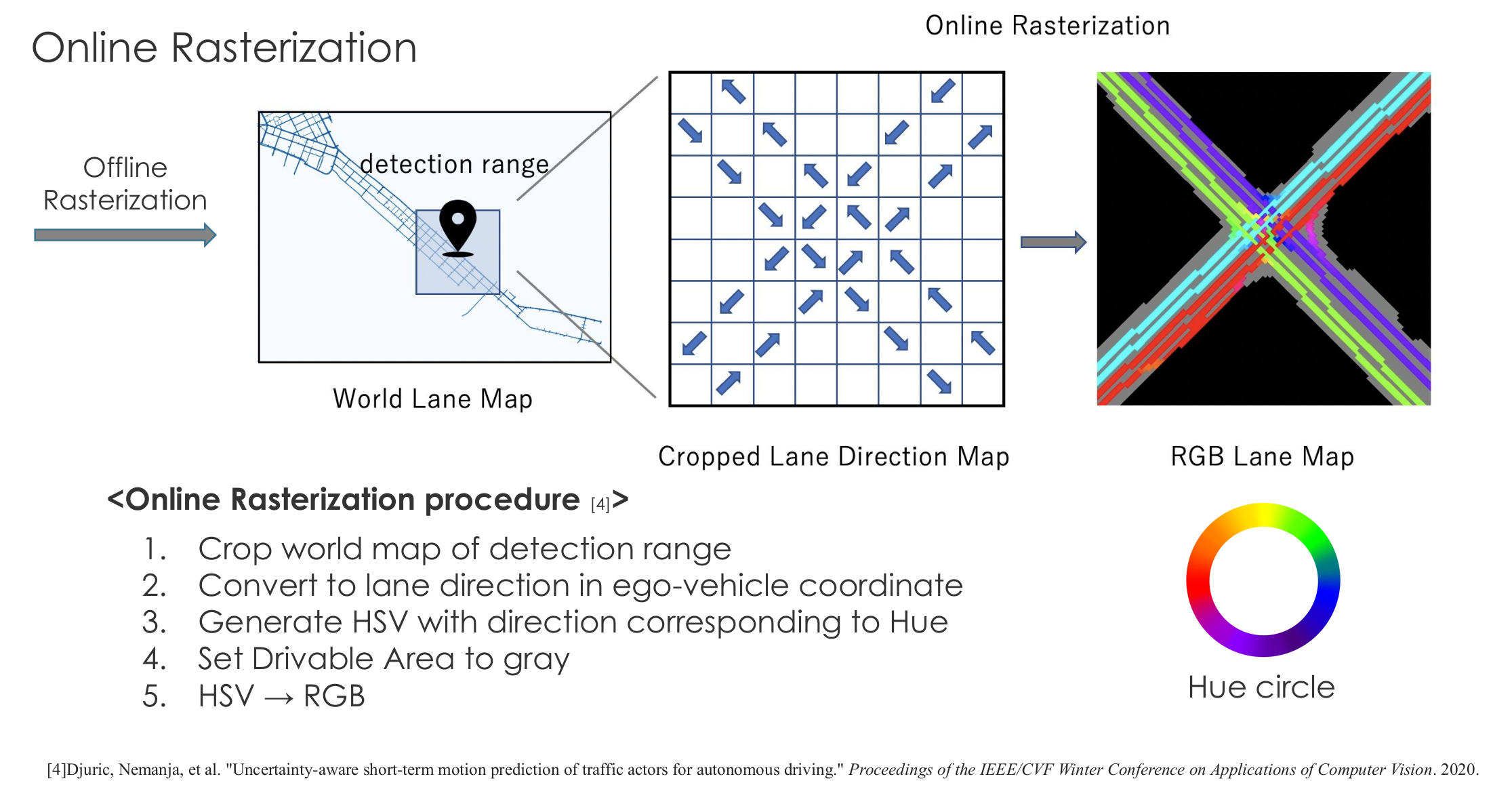
LaneFusionでは、offline rasterization と online rasterization を用いて、ベクター形式の情報をCNNに入力しやすい形に変換する。
experiments

Reference
- Taisei Fujimoto, Satoshi Tanaka, and Shinpei Kato: LaneFusion: 3D Object Detection with Rasterized Lane Map, the 2022 33rd IEEE Intelligent Vehicles Symposium (IV 2022), Proceedings, pp. 396-403.