Summary
- Worked on TIER IV, Inc.
- arXiv paper: https://arxiv.org/abs/2507.00190
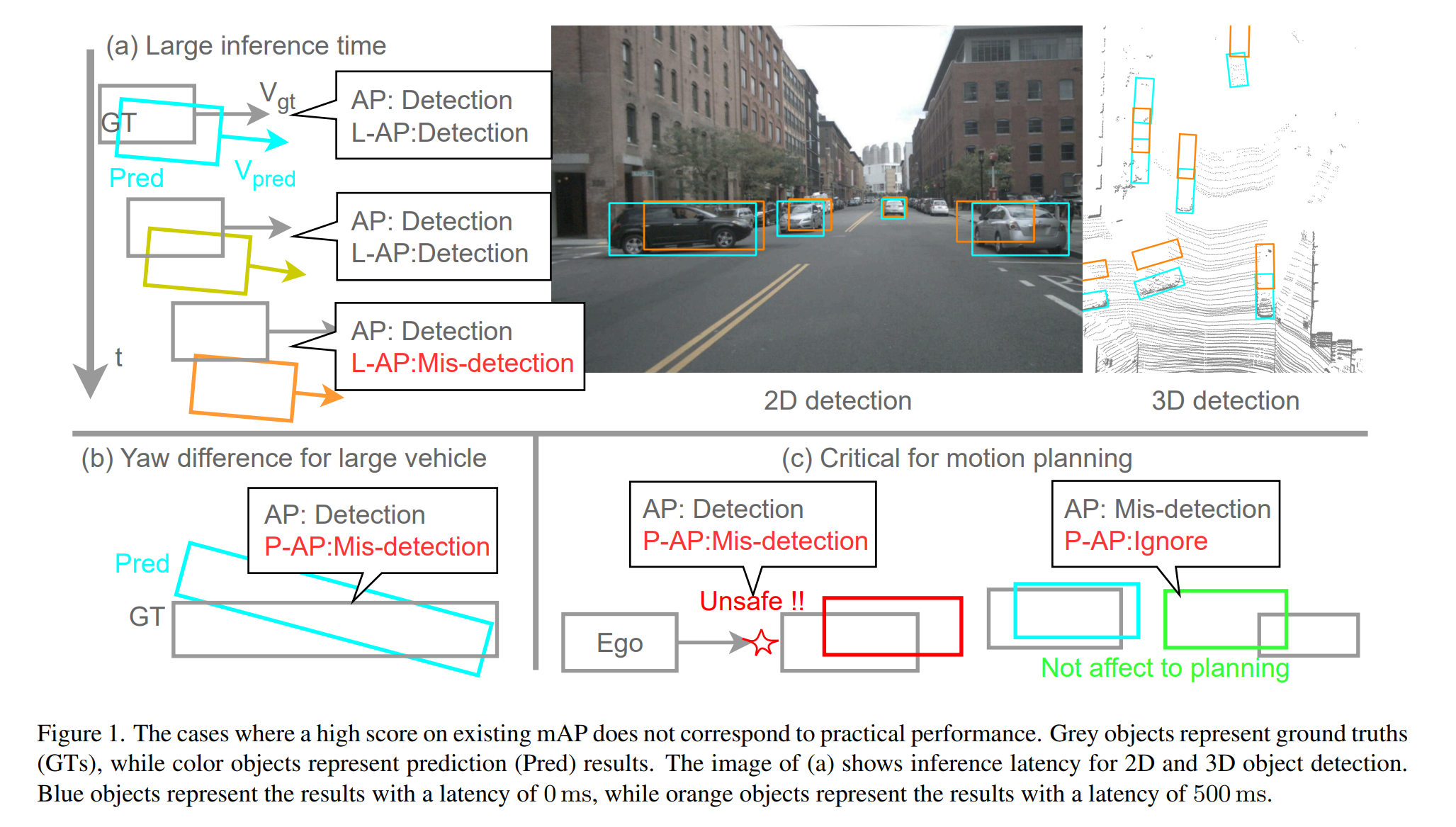
High-accuracy and low-latency 3D object detection is essential for autonomous driving systems. While previous studies on 3D object detection often evaluate performance based on mean average precision (mAP) and latency, they typically fail to address the trade-off between speed and accuracy, such as 60.0 mAP at 100 ms vs 61.0 mAP at 500 ms. A quantitative assessment of the trade-offs between different hardware devices and accelerators remains unexplored, despite being critical for real-time applications. Furthermore, they overlook the impact on collision avoidance in motion planning, for example, 60.0 mAP leading to safer motion planning or 61.0 mAP leading to high-risk motion planning. In this paper, we introduce latency-aware AP (L-AP) and planning-aware AP (P-AP) as new metrics, which consider the physical world such as the concept of time and physical constraints, offering a more comprehensive evaluation for real-time 3D object detection. We demonstrate the effectiveness of our metrics for the entire autonomous driving system using nuPlan dataset, and evaluate 3D object detection models accounting for hardware differences and accelerators. We also develop a state-of-the-art performance model for real-time 3D object detection through latency-aware hyperparameter optimization (L-HPO) using our metrics. Additionally, we quantitatively demonstrate that the assumption “the more point clouds, the better the recognition performance” is incorrect for real-time applications and optimize both hardware and model selection using our metrics.