Summary
- TIER IV, Inc. における成果
- arXiv paper: https://arxiv.org/abs/2507.00190
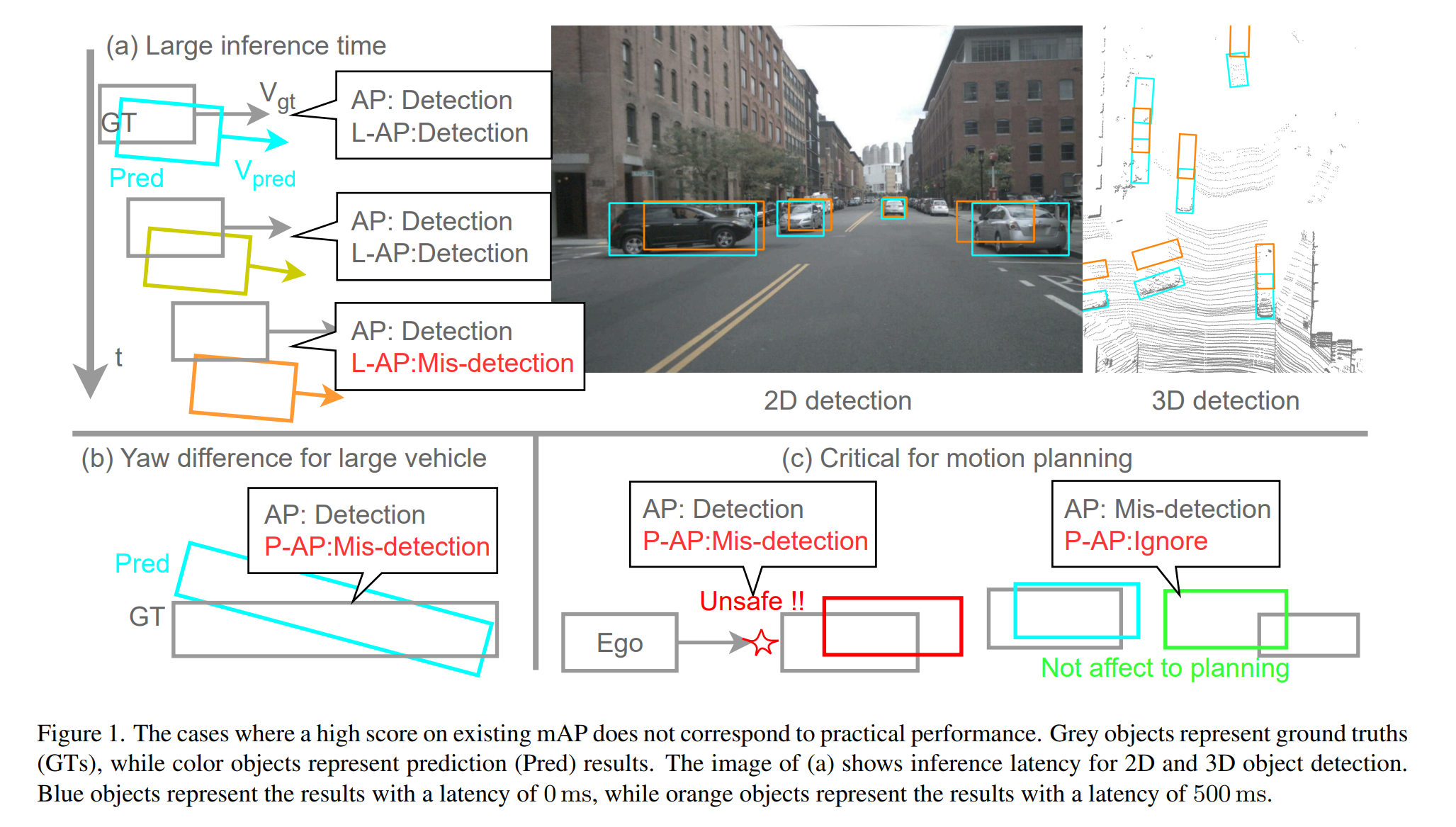
高精度かつ低遅延な3D物体検出は自動運転システムにとって不可欠ですが、これまでの3D物体検出に関する研究ではmAPや推論時間に基づいて性能を評価することが一般的であり、例えば「100msで60.0 mAP」と「500msで61.0 mAP」のような速度と精度のトレードオフに関する議論はほとんど行われていません。 また異なるハードウェアデバイスやアクセラレータ間のトレードオフを定量的に評価する研究は未開拓であり、これはリアルタイムアプリケーションにおいて極めて重要な課題です。 また多くの研究では動作計画における衝突回避性能への影響を無視しており、例えば「60.0 mAP のモデルがより安全な動作計画を導き出す一方で、61.0 mAP のモデルがリスクの高い動作計画につながる」といったケースも考えられます。 本研究では時間や物理的制約といった現実世界の要素を考慮した新たな評価指標として、 latency-aware AP (L-AP) と planning-aware AP (P-AP)を提案します。 これにより、リアルタイム3D物体検出の性能をより包括的に評価することが可能になります。 nuPlanデータセットを用いて提案指標の有効性を自動運転システム全体にわたって実証し、ハードウェアやアクセラレータの違いを考慮した3D物体検出モデルの評価を行いました。 L-AP を用いたlatency-aware hyperparameter optimization (L-HPO) により、リアルタイム3D物体検出におけるモデルを開発しました。 また「点群が多いほど認識性能が高い」という一般的な前提がリアルタイム応用においては必ずしも正しくないことを定量的に示し、我々の指標を用いてハードウェア選定とモデル選択の両面における最適化を行いました。