summary
Method
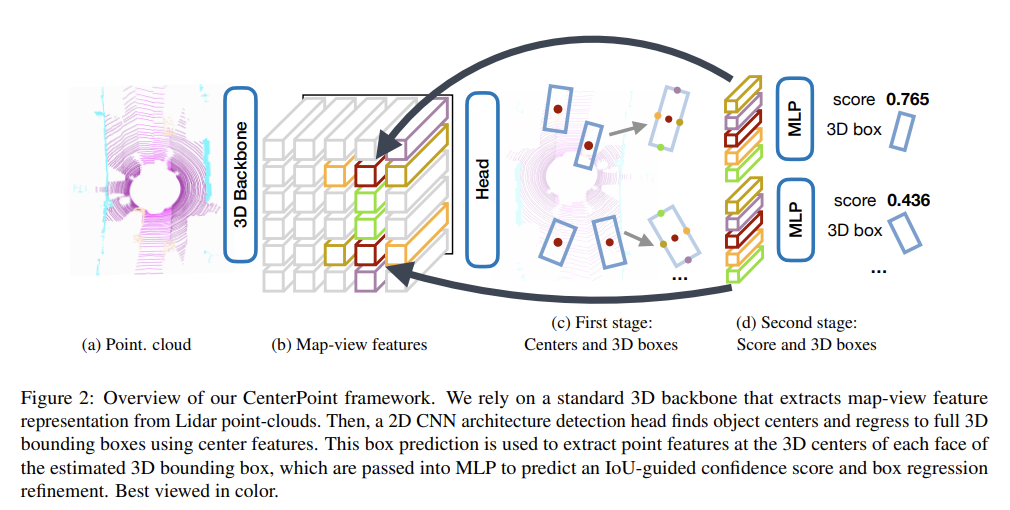
- 全体構成
- Backbone: pointcloud -> map-view features
- region proposal (Detection Head first stage): map-view features -> center position, 3d boxes
- fine detection (Detection Head second stage): proposal map-view features -> score, 3d boxes
Preprocess
- Densification
- v2で追加
- 点群をn frame利用する (nuscenesでn = 3)
- 各フレームに現在フレームからの時間差を特徴量として追加する
Backbone : pointcloud -> map-view features
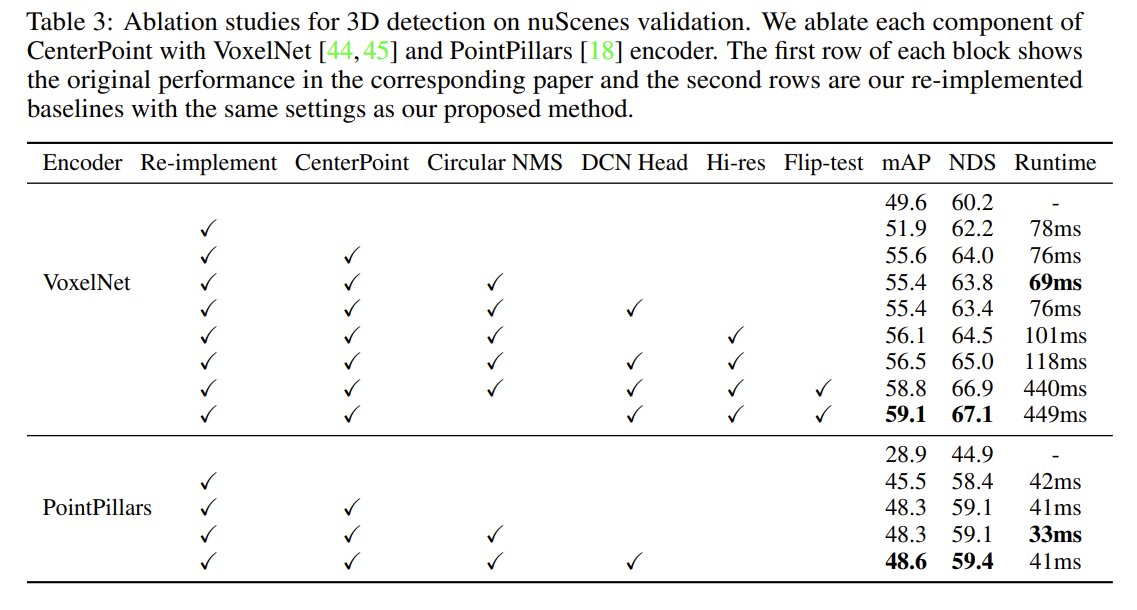
- PointPillars-based encoder
- pointcloud -> stacked pillars
- 9-dimensional feature extractor that includes 3D location (3), intensity (1), offsets to 3D pillar center (3), and offsets to 2D grid center (2)
- learned features
- puesudo image (bird’s-eye-view 2D feature map)
- 工夫
- Dynamic Voxelization
- v2から
- MVFで提案、GPUで計算することで高速化
region proposal (Detection Head first stage): map-view features -> center position, 3d boxes
- bird’s-eye-view center estimation (Heatmap)
- 推定するもの
- offset (x, y, z)
- z
- 3D size (w, l, h)
- orientation (sin α, cos α)
- velocity estimation
- 工夫
- heatmapがスパース -> objectのground truthにガウシアンカーネルかけて学習する
- detection head: rotationも出力
- Circular NMS: 回転にも対応したNMSかつ早い
- Double-flip testing: 対称なheatmapを生成して学習
- IoU-Aware Confidence Rectification Module
- v2から
- CIASSDで用いられている手法
- one additional regression head to predict the
IoU between object detections and corresponding ground
truth boxes
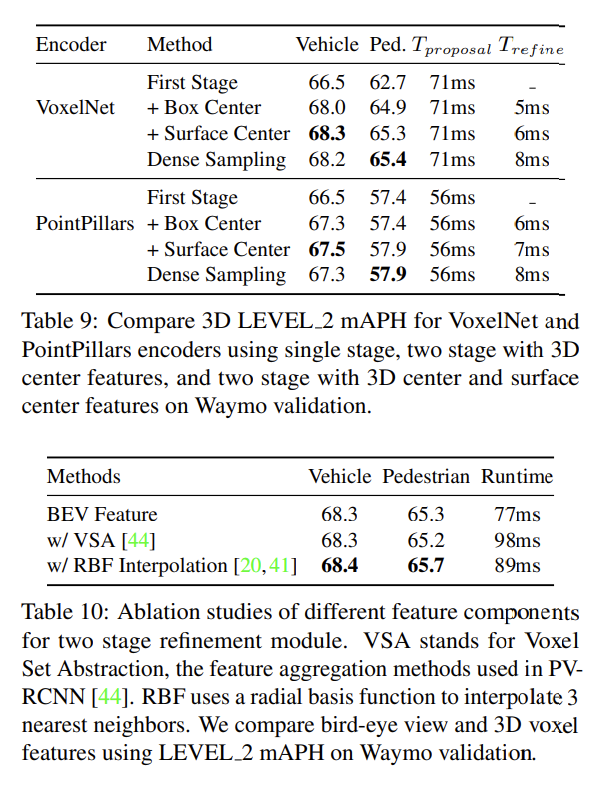
fine detection (Detection Head second stage): proposal map-view features -> score, 3d boxes
- 2 stage目はv2で追加
- 1st stageで得られたcenter pointからmap featureのROIを取ってきて、それを一列にしてMLPにかけている
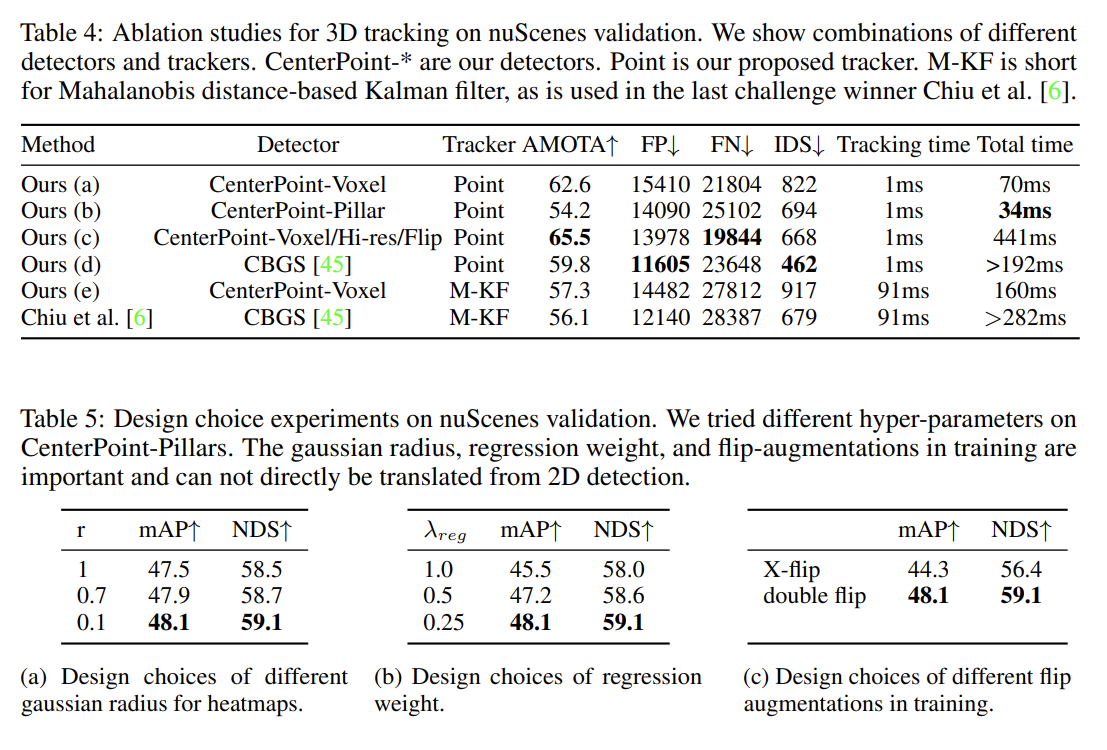
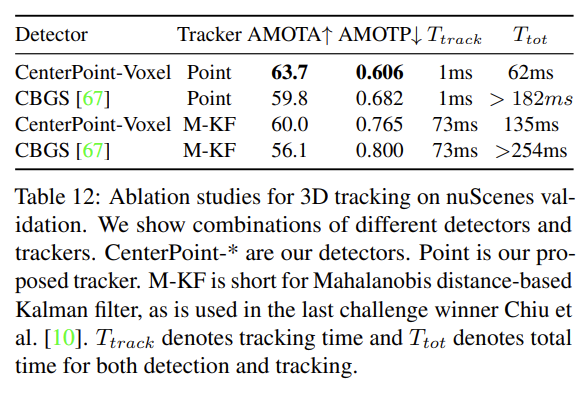
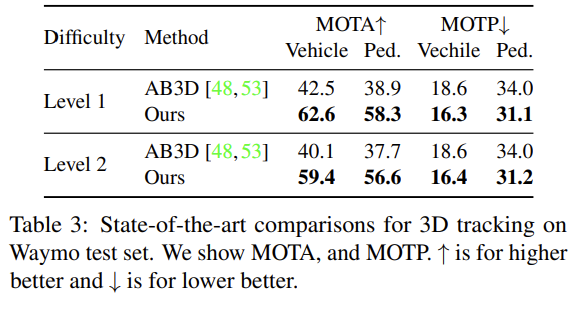
- Tracking
Experiment
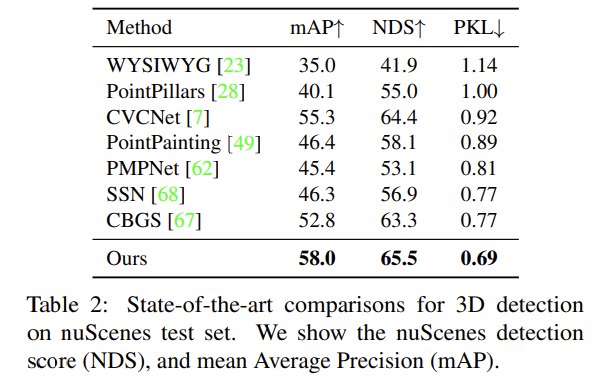
nuScenes
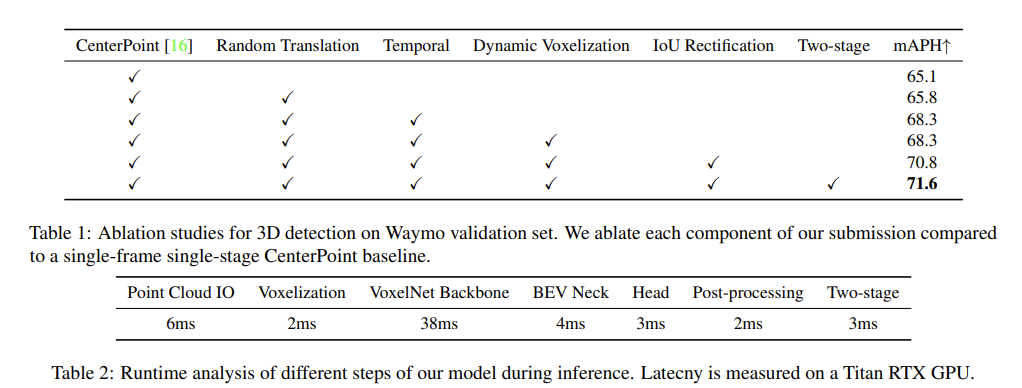
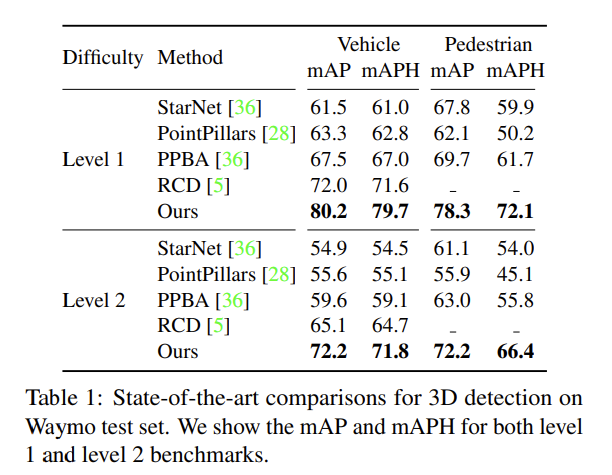
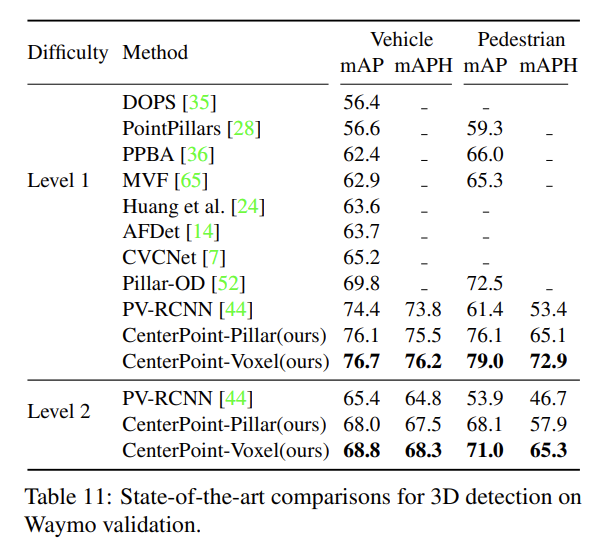
waymo
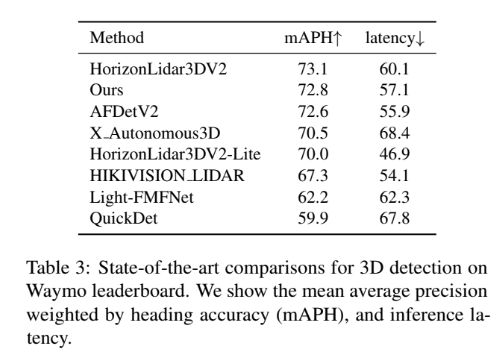
CenterPoint++ submission to the Waymo Real-time 3D Detection Challenge (CVPR 2021 workshop)
summary
- まとまっていて(ある程度知っているなら)分かりやすい
- The real time version of CenterPoint ranked 2nd in the Waymo Real-time 3D detection challenge (72.8 mAPH / 57.1 ms)
- Tips
- Temporal Multi-sweep Point Cloud Input
- Dynamic Voxelization
Method
- pointcloud: $ P = {(x, y, z, r)_i} $
- bounding box b = (u, v, d, w, l, h, α)
evaluation