DeepFusion: A Robust and Modular 3D Object Detector for Lidars, Cameras and Radars (IROS2022)
Summary
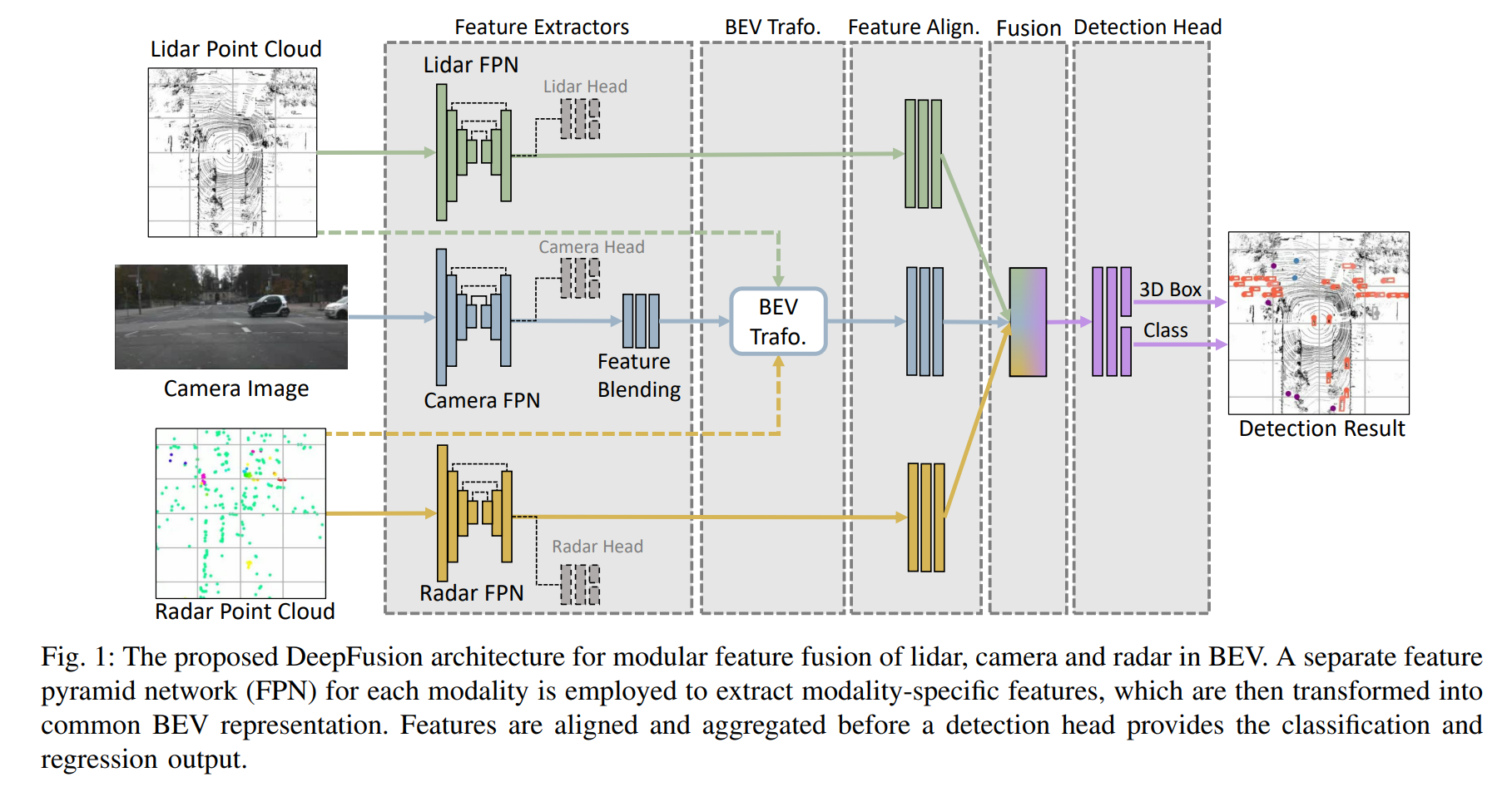
- moduleのように扱える BEV baseのCamera-LiDAR-Radar fusion 3d detection
- 定性評価で細かく解析
- LiDAR only だと縦列駐車のようなオクルージョンに弱い、100-140mでの検出が弱い
- Camera fusionでそれらを補填できることを示している
Method
Experiment
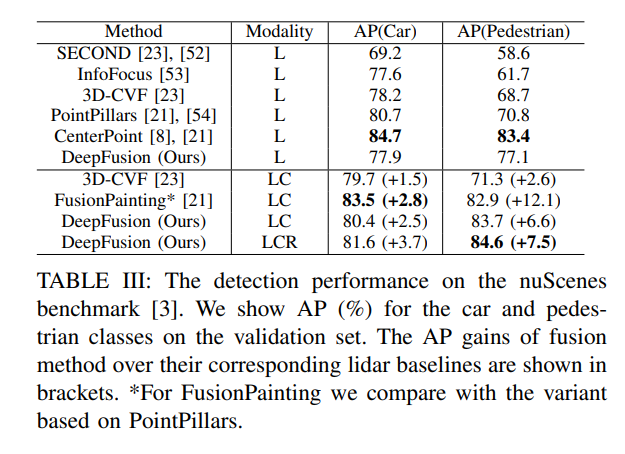
- Datasetは内製
- The experiments are mainly conducted on our internal multi-modal Bosch dataset
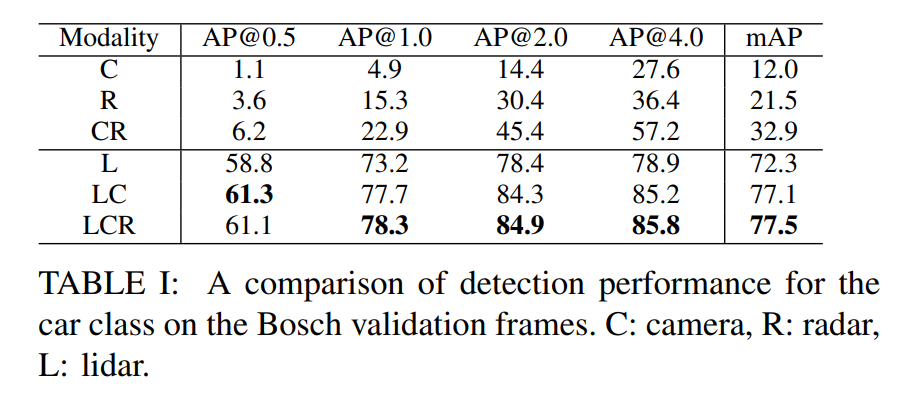
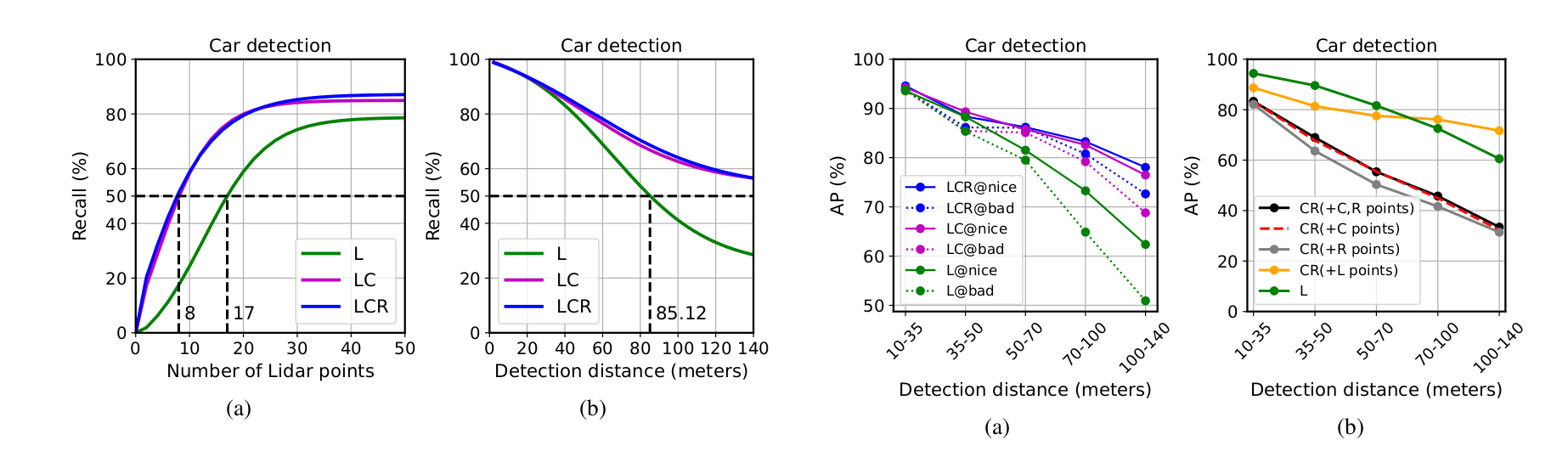
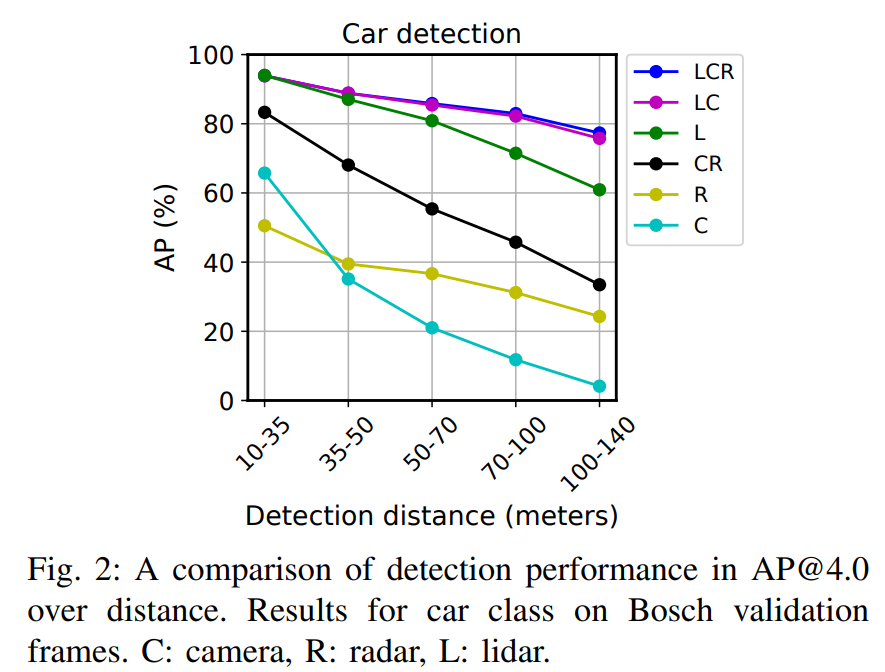
- 距離別
- Camera onlyだと35m以内が限度になってしまう
- LとLCの違いは遠距離の検出率
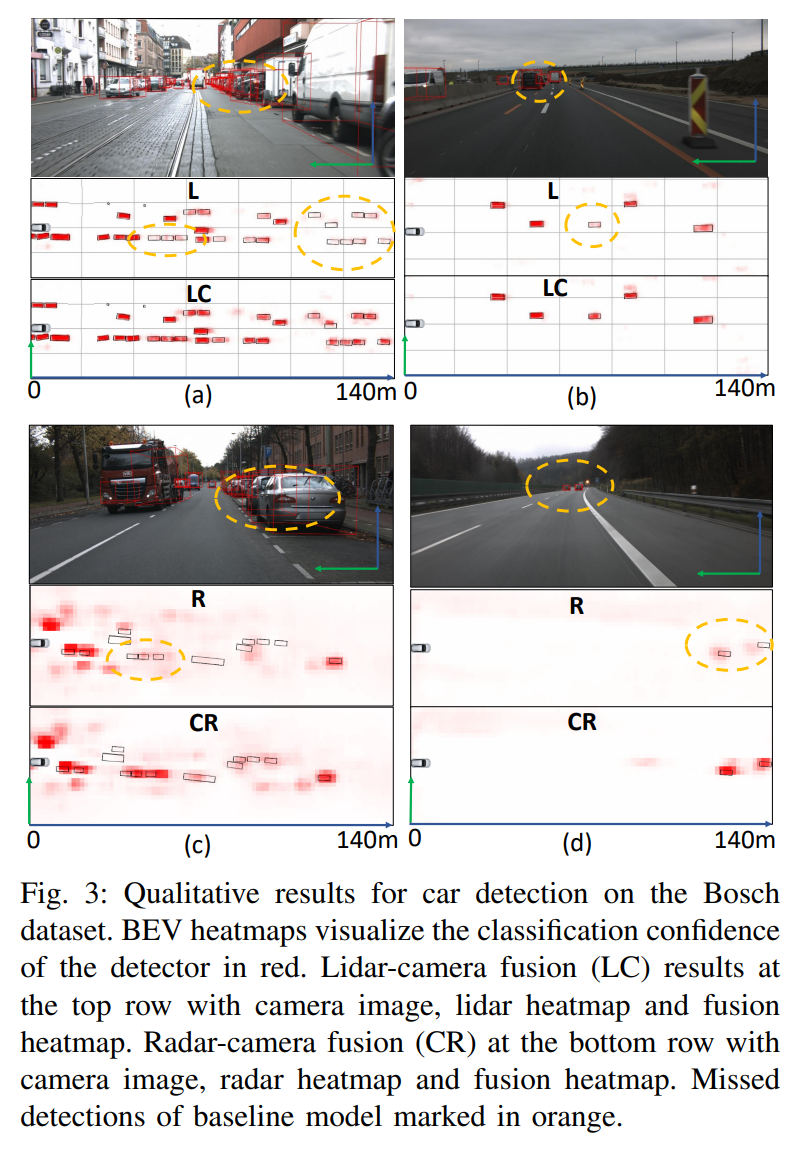
- 可視化
- この可視化だと前方しか見てないけど、Fig.1見る感じ一応周囲全部見てはいそう
- LiDARだけ
- 路駐などの重なりに弱い
- 100m-140mがとたんに見えなくなる
- Camera-LiDAR fusionだとそれらの補填ができるようになる
- 遠距離detectionもRだけだと微妙で、CRにしてかなり強めに検出できている感じ
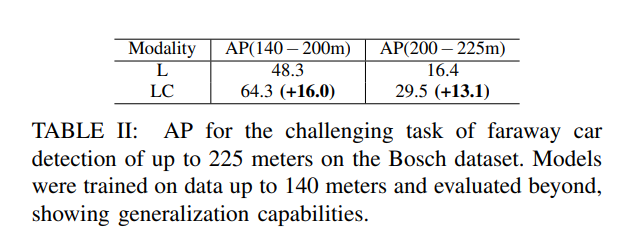
- 遠距離の評価
- ここでのRの評価を見たいんだけどなぁ
- 140-200mでLCで64.3はすごい