On-the-fly Category Discovery for LiDAR Semantic Segmentation (ECCV2024)
Summary
- Unknown objectのための LiDAR Semantic Segmentationに必要なカテゴライズの導入
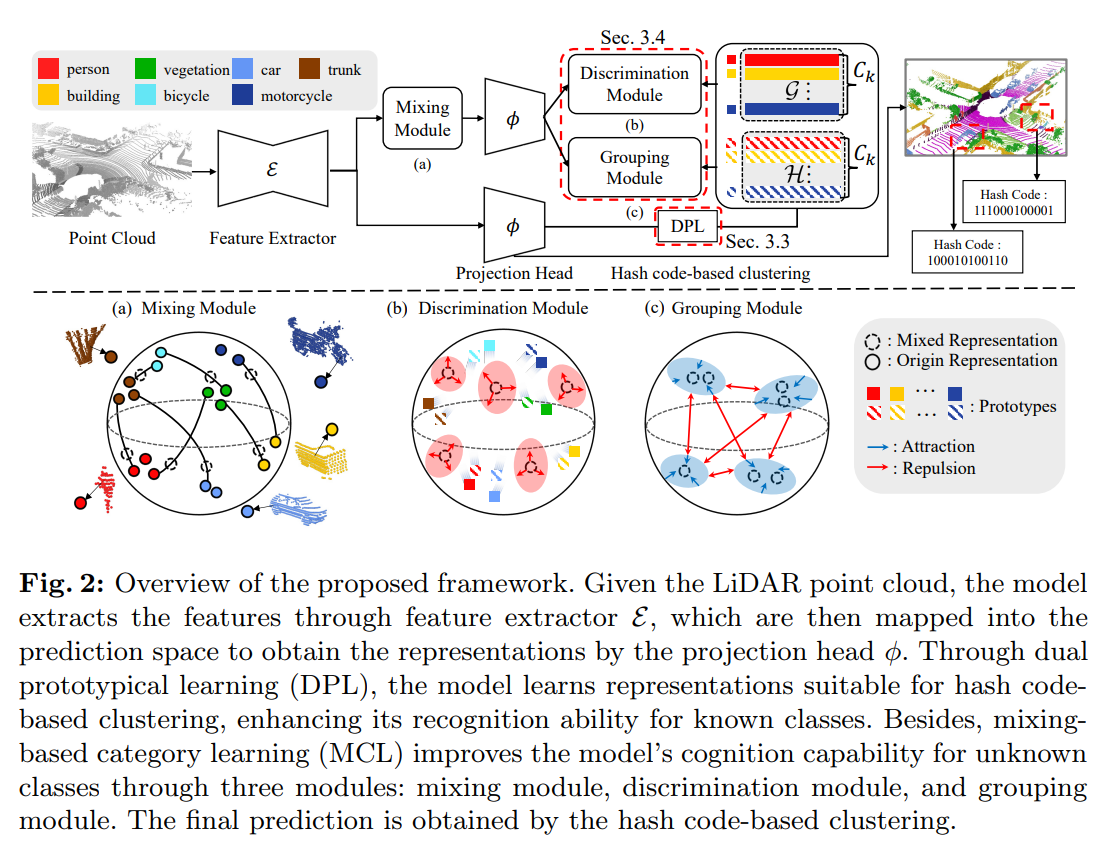
Method
- Baseは “On-the-fly Category Discovery (CVPR 2023)”
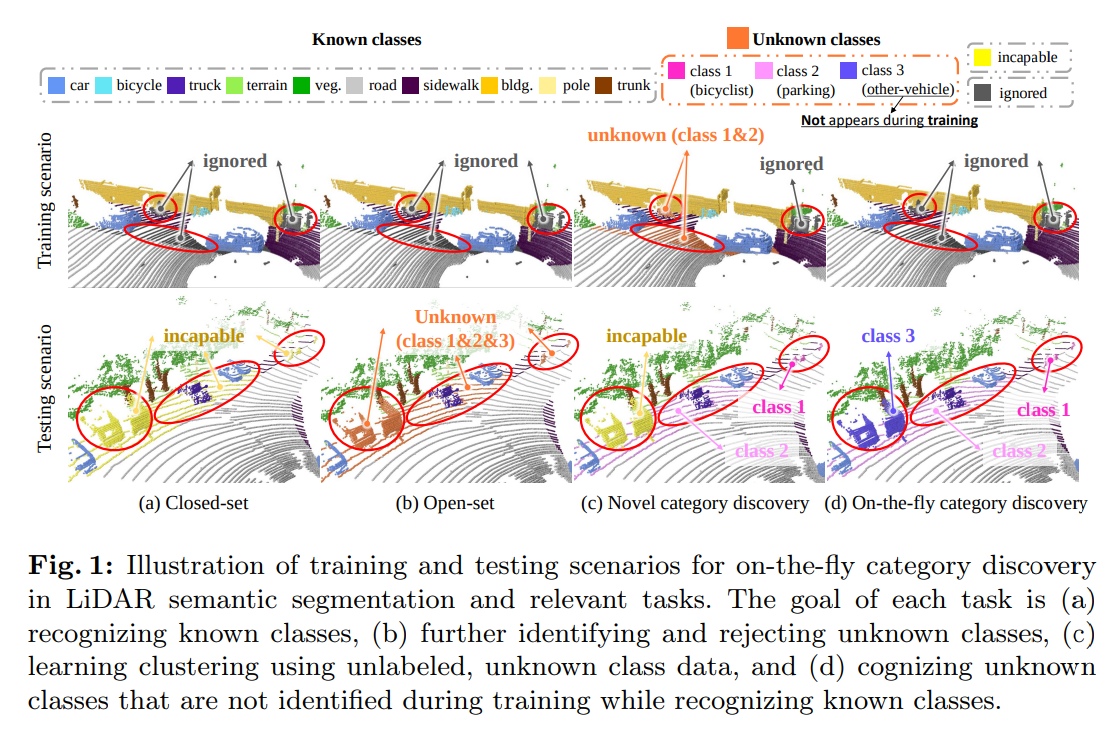
- 解きたいタスクの違い
- (a) Closed-set: recognizing known classes
- (b) Open-set: further identifying and rejecting unknown classes
- (c) Novel category discovery: learning clustering using unlabeled, unknown class data
- (d) On-the-fly category discovery: cognizing unknown classes that are not identified during training while recognizing known classes
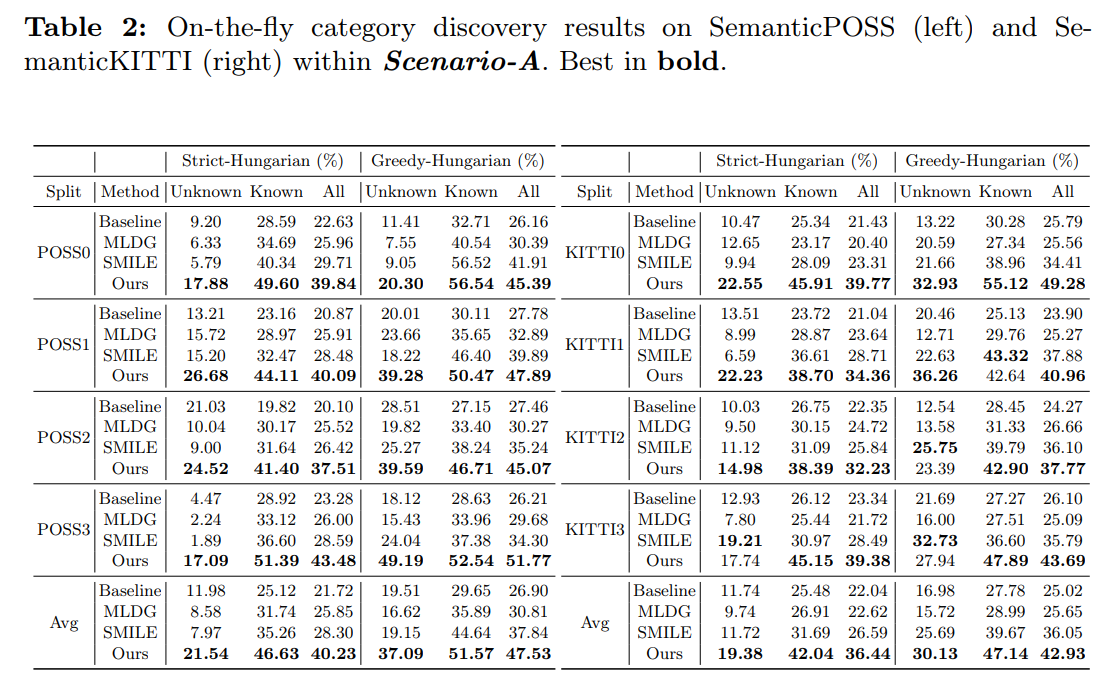
Experiment