summary
- UberによるPrediction framework REINFORCE の提案
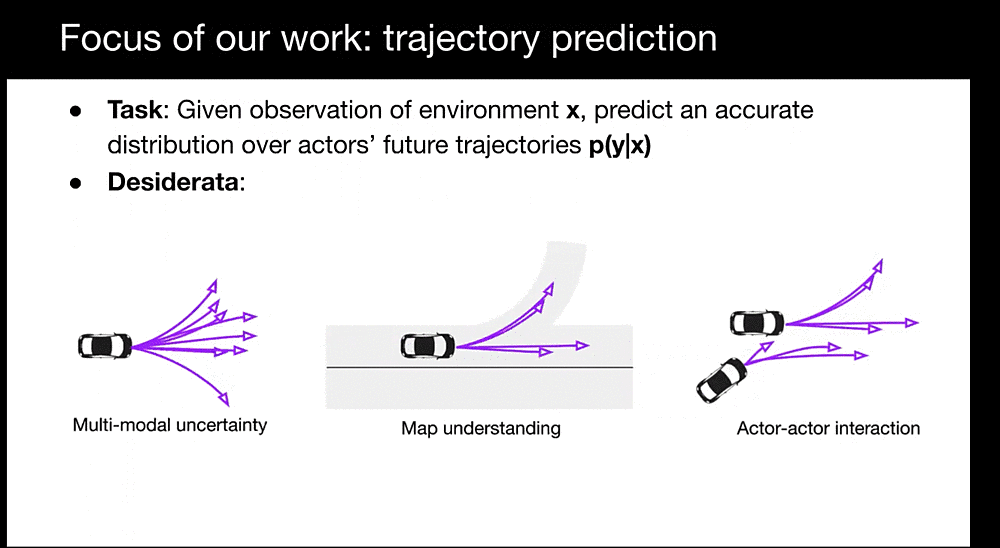
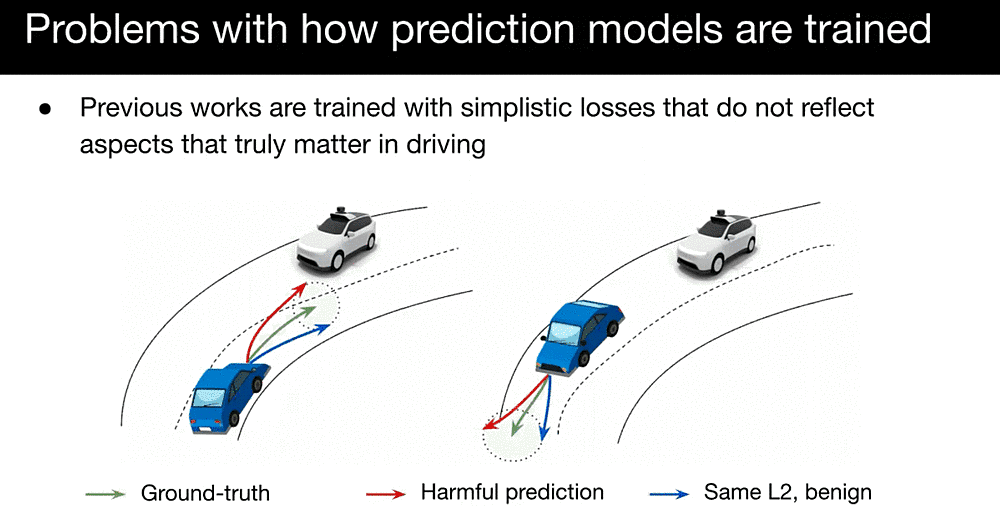
- Mapや交通ルールから好ましい予測のoutputを出したいが、基本的に微分不可能
- REINFORCE gradient estimatorを使う
- minADEだけ使っても意味がないよ
Background
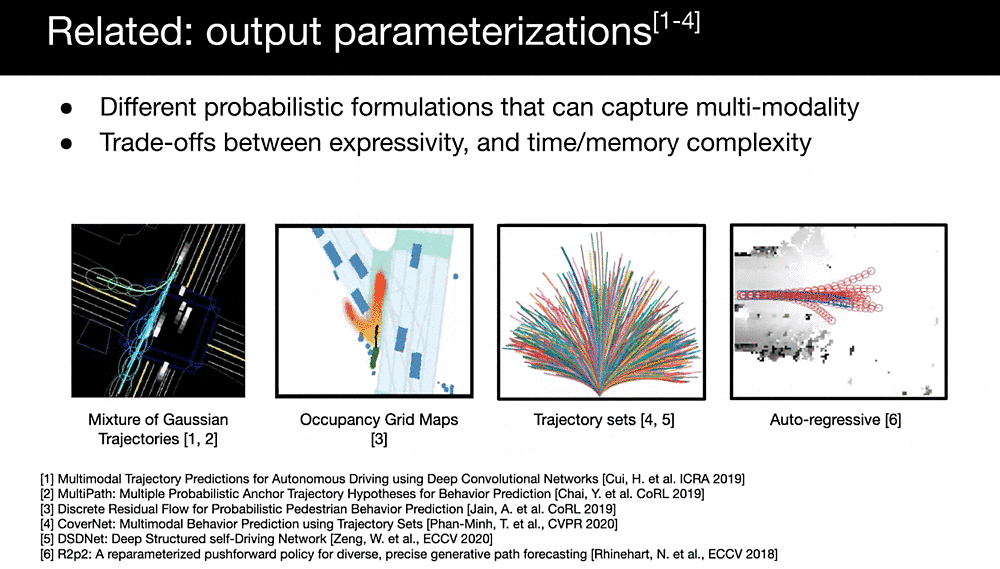
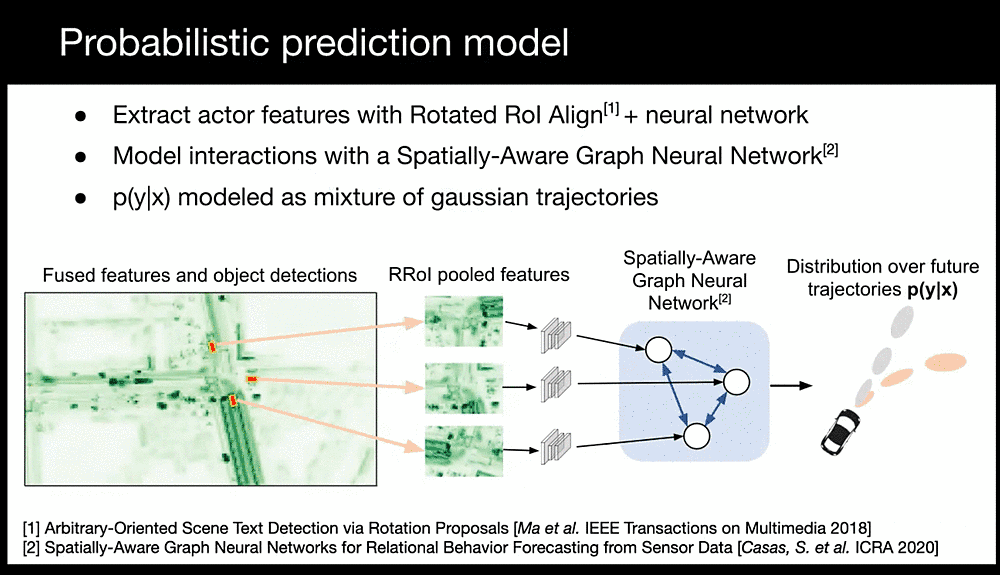
- この論文はMixture of Gaussian model
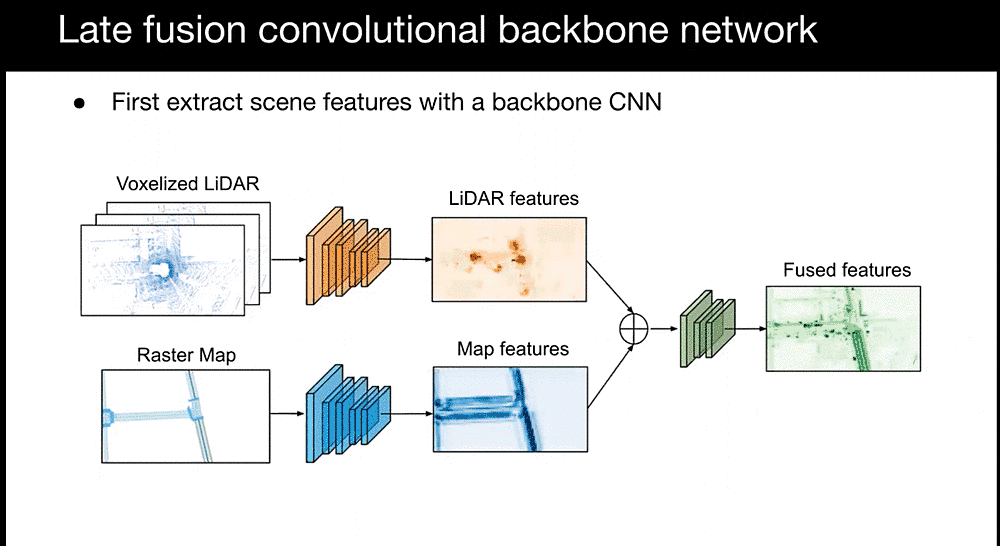
Method
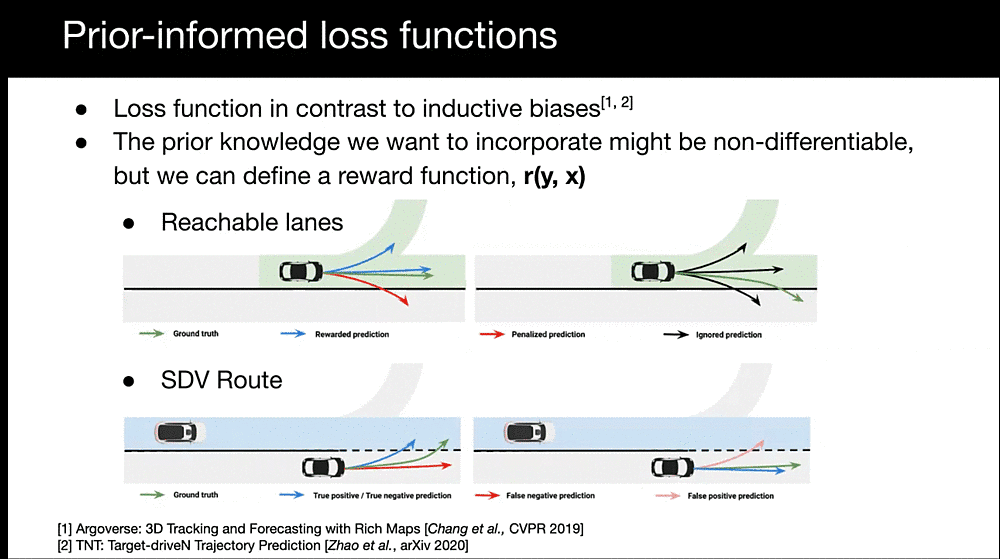
- Prior
- Reachable Lanes
- SDV Route
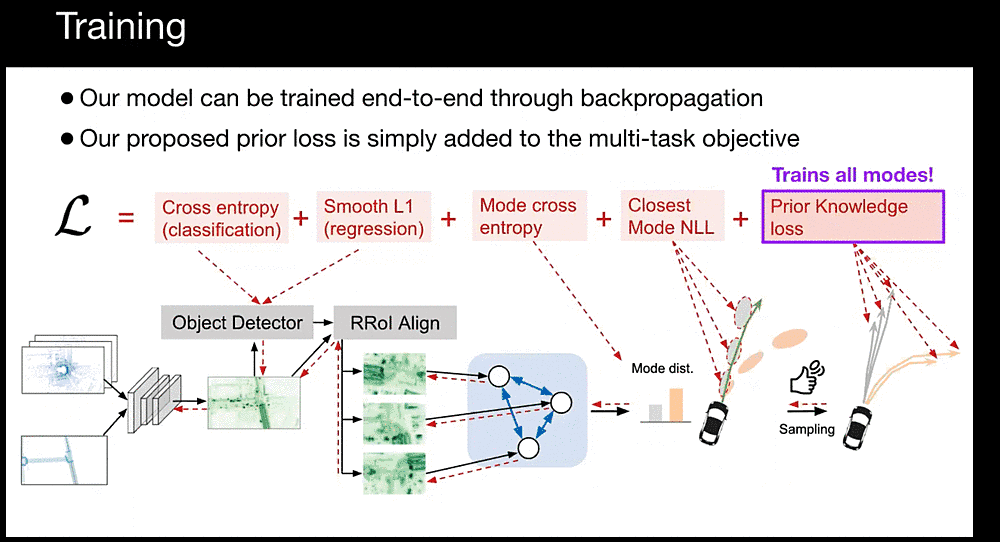
- Prior-informed loss function
Metrics
-
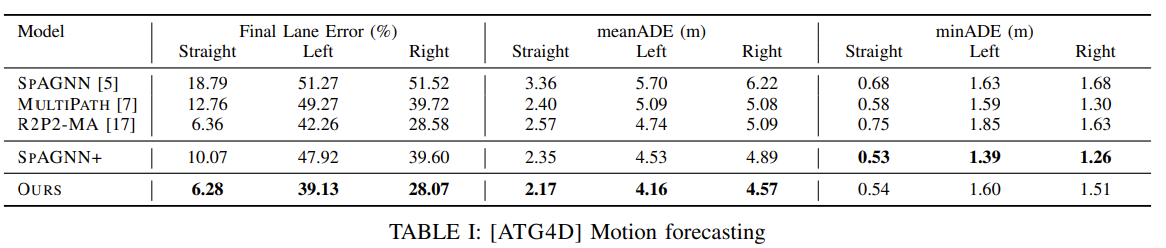
- Motion Forecasting
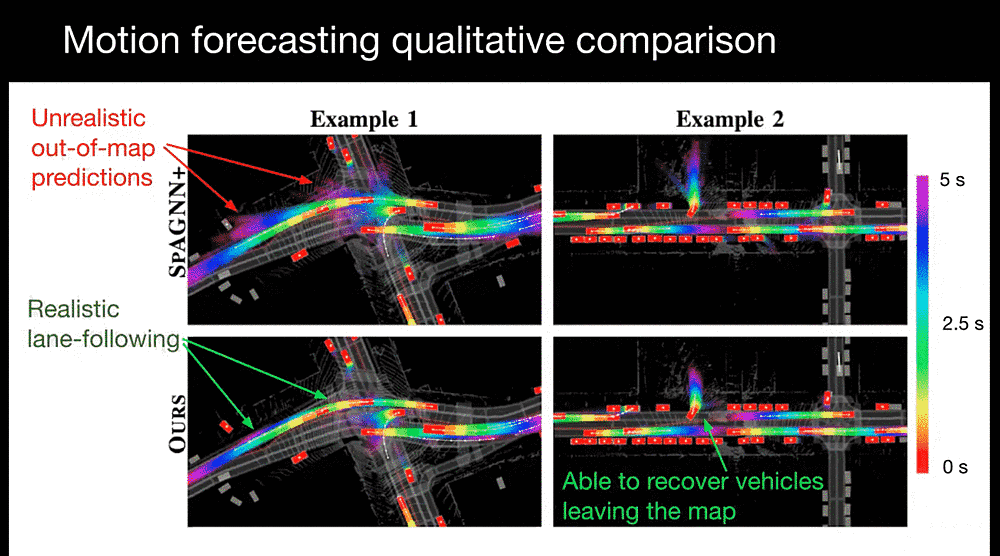
- (i) the final lane error (trajectory waypoint inside vs. outside the reachable lanes at 5 seconds into the future) to measure map understanding
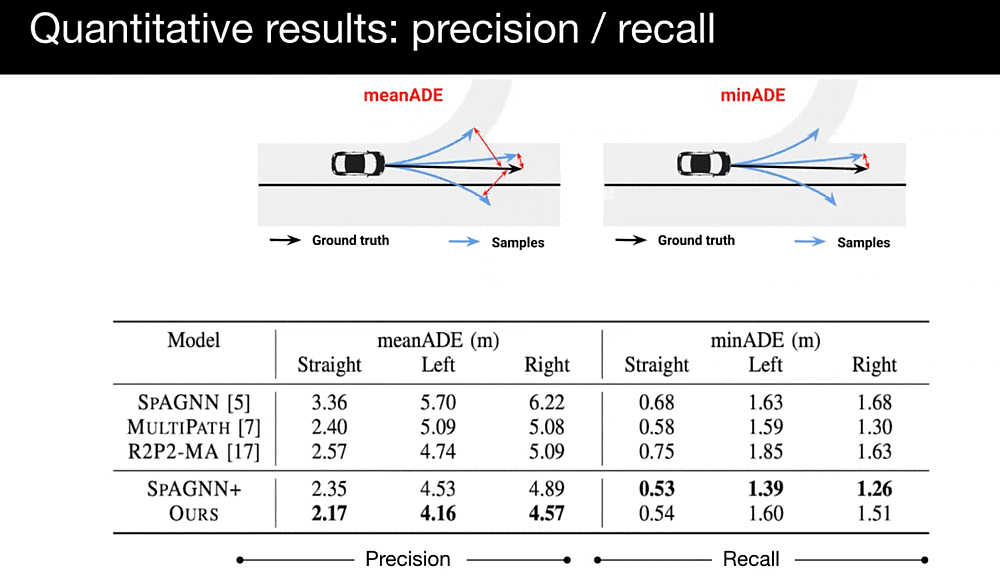
- (ii) minimum average displacement error (minADE) to show the recall of our motion forecasts at different time horizons
- (iii) mean average displacement error (meanADE), idea of the precision of our predictions since unrealistic samples severely harm this metric
- これだけでは足りない
-
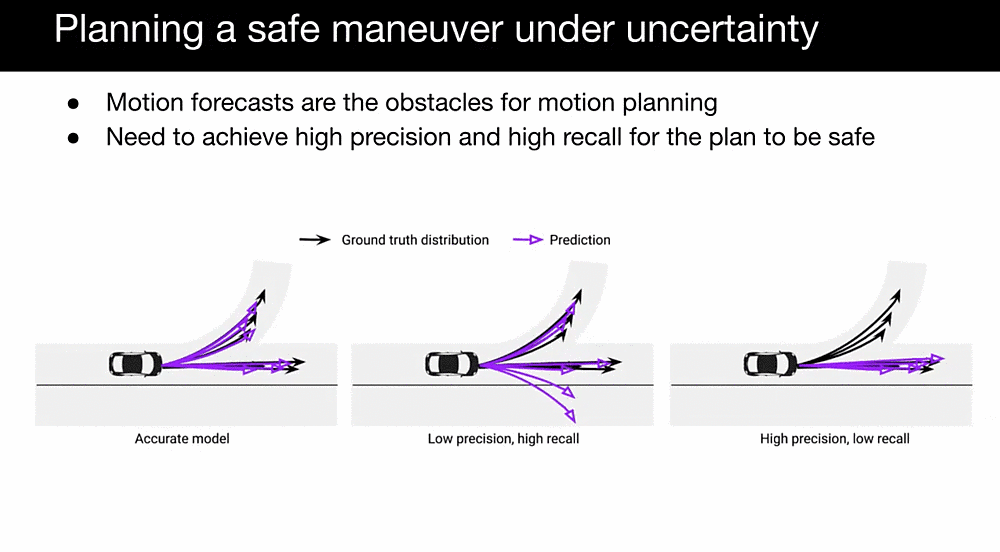
- recall is easily achievable at the expense of precision by simply predicting very fan-out(四方八方 に散る) distributions.
-
- precision in the motion forecasts is critical for safe motion planning
-
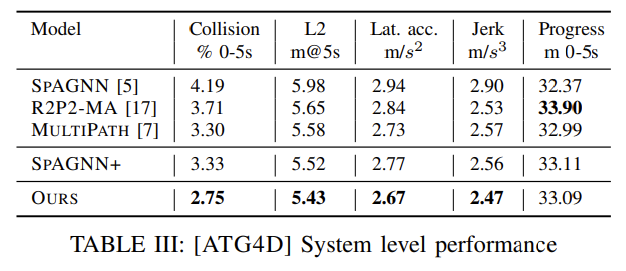
- Ego-Motion Planning
- We feed the planner with 50 trajectory samples for each vehicle, as a Monte Carlo approximation of the marginal distribution
- 乗り心地も評価
- We focus on the safety-related metric of collision rate
(% of time the SDV plan collides with any other traffic
participant in the ground-truth, for a future horizon of 5
seconds).
- lateral acceleration and jerk
Experiment
Discussion
- 非常に社会実装のことを考えたPrediction評価