Summary
- from Uber
- 1 agentごとの静的地図+他の車両など動的状況をラスタライズ化した画像をinputとした1 agent, single-modal prediction
Background
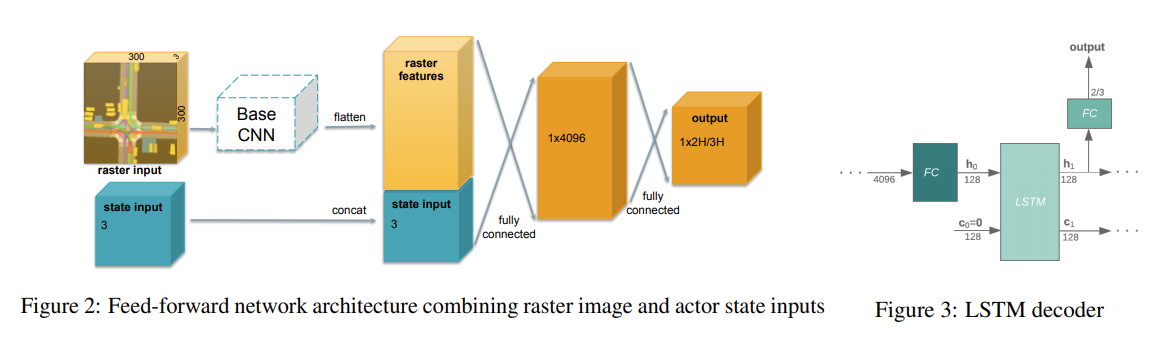
Method
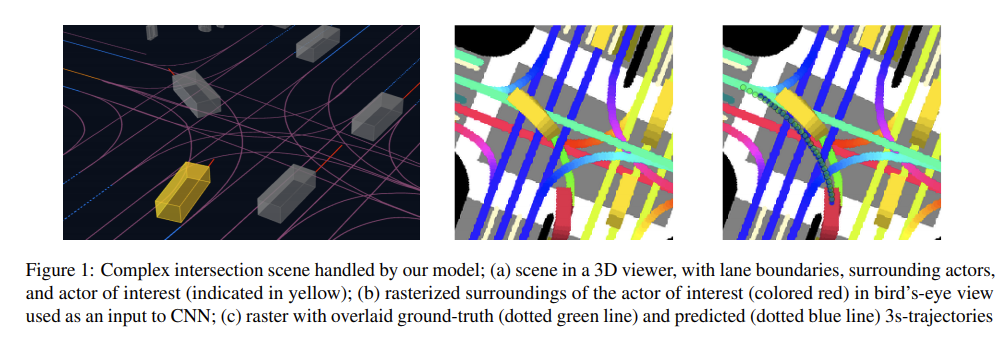
- Input
- Rasterized input
- RGBの3chのデータ
- 道路、横断歩道などvector mapの各レイヤーに固有のRGB値を定義 (横断歩道は白など)
- 車線方向は向きに応じてHSV色空間から割り当て
- 色相(Hue): 車線方向に対応. 0度は赤、120度は緑、240度は青
- 彩度(Saturation), 明度(Value): 最大
- HSV→RGBに変換
- 検出した車両のbounding boxにも固有の色相を定義
- 一定のタイムステップの追跡状態を表示
- 過去の状態ほど明度を下げてフェーディング
- 設定した色を,道路など広い領域のレイヤーから車線や,bounging boxなど細かい構造の順に重ねてrasterization
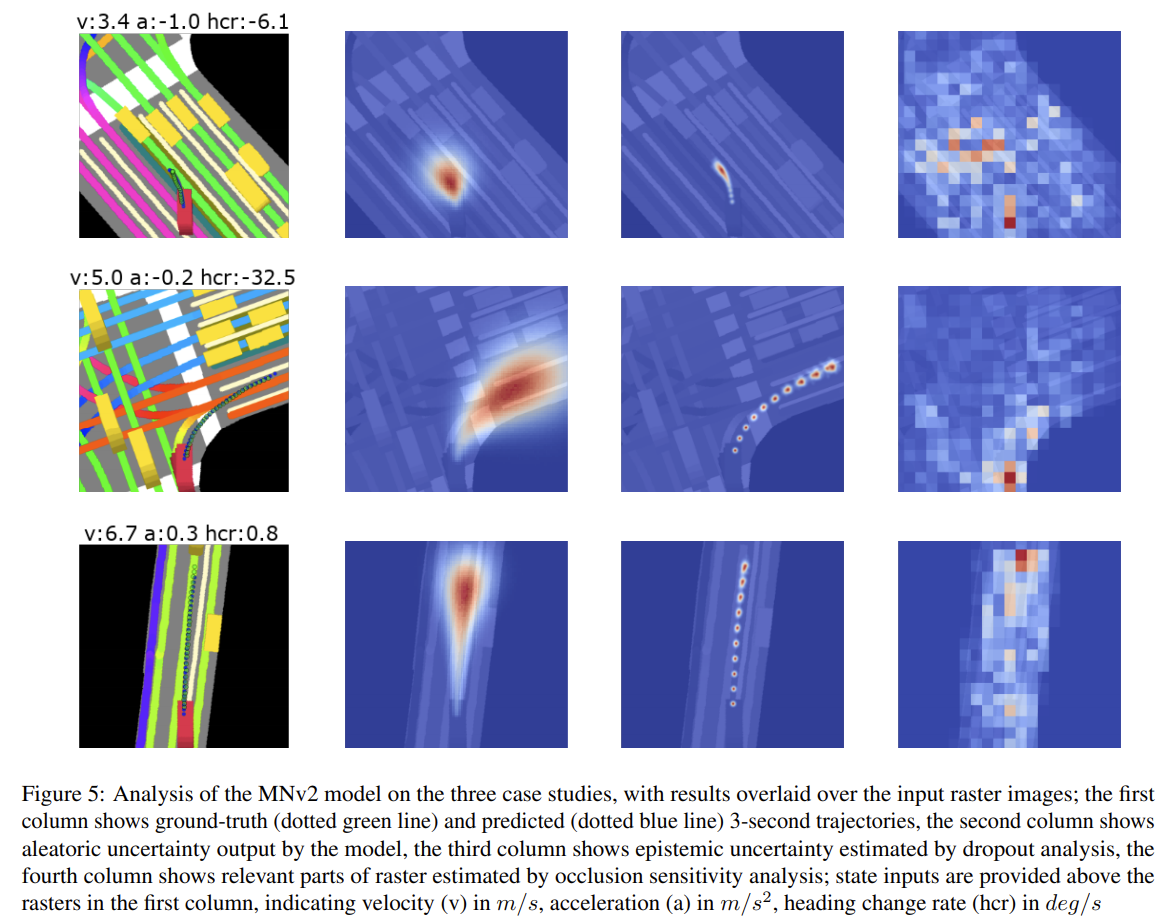
- State input (注目車両の速度、加速度、向き)
- Rasterized input