Summary
- 使いやすい形になっているっぽい
- 素人でもcalibrationができるようなtarget-based なLidar- Camera calibのパイプラインの構築
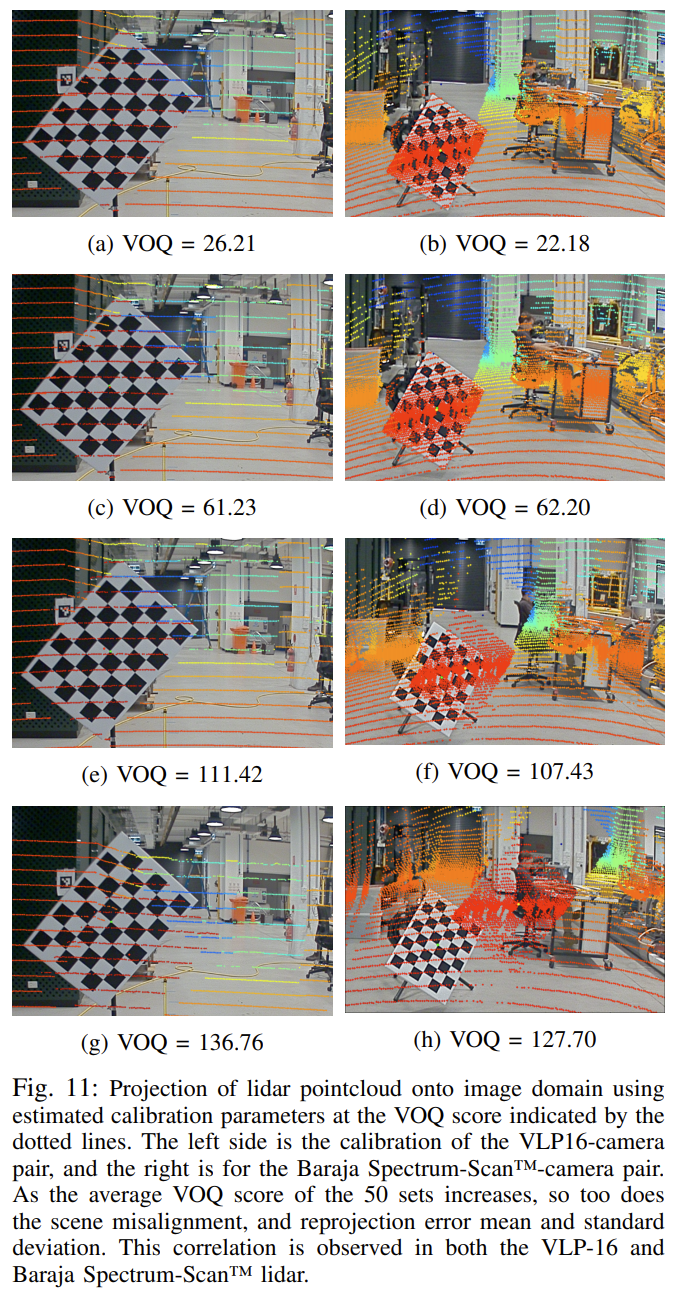
- Variability of Quality (VOQ)というcalibrationのための指標を作り、それを最小にする最適化を回す
- calib boardだけにfittingするだけでなく、色んなシーンにfittingするようなcalibを目指して、平均と標準偏差を用いてreprojection errorを計算する
- よくあること
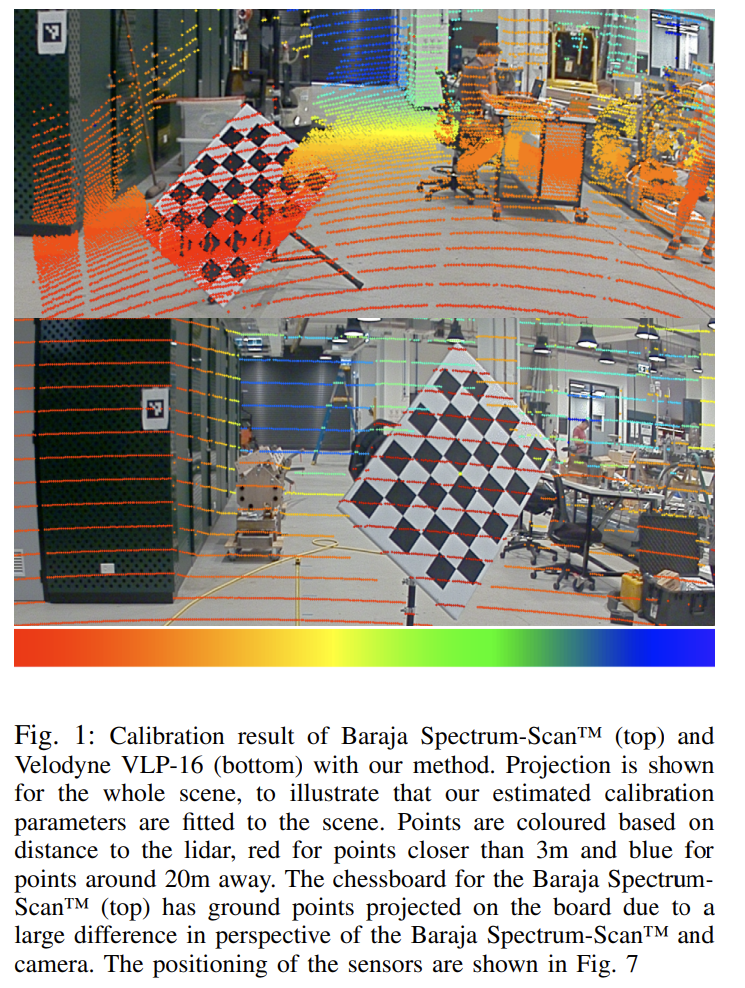
- (a) (b) 1.7 pixel error、ボードに合わせた結果、柱で合ってない
- (c) 2.7 pixel error、こっちのほうが良い感じ
- (d) 3 pose, (e) 9 pose param弄ってるけどほとんど変わらない

Background
- The fundamental theoretical problem in calibration is the computation of the transform between two frames (camera and lidar in our case), which is solved in theory but challenging, and often underestimated in its application.
- 「過小評価されている」って言い方が重要性分かっている人って感じ
- 分類
-
- Targetbased, which operates in a controlled, and often indoor environment to minimise the influence of environmental factors
-
- Targetless, which uses features from the environment and aims to remove the human element of the calibration process
- The importance of good data is commonly stressed in many machine learning algorithms, but not often so in extrinsic calibration methods
- 優れたデータの重要性は、多くの機械学習アルゴリズムで一般的に強調されていますが、外部キャリブレーション方法ではそれほど強調されていません
- いいね、アンチな感じがいいね
Method
- Variability of Quality (VOQ) = $ K_{LC} + e_{be} $
- $ K_{LC} $ : linear dependency
- 3.A. LINEAR DEPENDENCE IN THE NORMAL MATRIX
- $ K_{LC} = max (κ(NL), κ(NC)) $
- $ e_{be} $ : average board error
- III.B. ERROR IN LIDAR MEASUREMENTS
- RANSACを用いてtargetのedgeを決定、交点でコーナー検知
- その時のedge lengthsの誤差のsumを計算する
Experiment
Discussion