Profile
||||||| parent of 7d21ccb (rebuilding site 2020年 12月 14日 月曜日 01:22:54 JST)Profile
=======-
||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
- English version
- 田中 敬(たなか さとし) <<<<<<< HEAD <<<<<<< HEAD
- 2020⁄04-Now 株式会社ティアフォー Perception Engineer ||||||| parent of 7d21ccb (rebuilding site 2020年 12月 14日 月曜日 01:22:54 JST)
- 2020⁄04-Now 株式会社ティアフォー Perception Engineer
- Contacts: Twitter Github
- Hobby =======
- 2020⁄04-Now 株式会社ティアフォー ||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
- 2020⁄04-Now 株式会社ティアフォー =======
- 2020/04-Now 株式会社ティアフォー
>>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
- Autonomous Driving Perception Algorithms Engineer <<<<<<< HEAD
>>>>>>> 7d21ccb (rebuilding site 2020年 12月 14日 月曜日 01:22:54 JST)
||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
- 2020/04-Now 株式会社ティアフォー Autonomous Driving Sensing/Perception Engineer
- Internship
- 2018/04-2019/03 Preferred Networks Part-time Engineer
- 2017/08-2018/03 株式会社日立製作所 研究補助員
- 2018/04-2020/03 東京大学大学院 修士課程
- 情報理工学研究科 創造情報学専攻(石川妹尾研究室)
- 2014/04-2018/03 東京大学
-
<<<<<<< HEAD
- 理科1類 → 工学部精密工学科(神保小谷研究室)
||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
- 教養学部理科1類 → 工学部精密工学科(神保小谷研究室)
- 教養学部理科1類 → 工学部精密工学科(神保小谷研究室) >>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
- Robotics, Perception, Computer Vision, Control theory
- 人より大きいダイナミクスを扱うロボットシステムの構築 <<<<<<< HEAD ||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
- 人間より器用かつ速くタスクを達成する,物理世界とインタラクションする自動ロボットシステムの構築
- 1000fpsの高速画像処理を用いた高速ロボットのシステム設計
- 磁石ギアを用いた高速かつ柔らかい挙動ができる機構開発
- 塑性変形制御,ダイナミックなマニピュレーションを実現する高速ロボット制御
- 高速画像処理の物流・無人航空機(UAV)応用
=======
- 人間より器用かつ速くタスクを達成する,物理世界とインタラクションする自動ロボットシステムの構築
- 1000fpsの高速画像処理を用いた高速ロボットのシステム設計
- 磁石ギアを用いた高速かつ柔らかい挙動ができる機構開発
- 塑性変形制御,ダイナミックなマニピュレーションを実現する高速ロボット制御
- 高速画像処理の物流・無人航空機(UAV)応用 >>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
Project
- 【研究】研究成果一覧
- ロボットコンテスト
- ABUロボコン2016年大会チームリーダー
- 国内大会優勝,世界大会ベスト4・ABUロボコン大賞受賞
- CAD用マウス
- Maker Faire Tokyo 2017 出展, GUGEN2017 1次審査通過
- 趣味
Using Tool
-
<<<<<<< HEAD
- Linux (Ubuntu)
- Vim
- C++, Python
- CAD (SolidEdge, SOLIDWORKS, Fusion360) ||||||| parent of 4eff4ae (rebuilding site 2020年 11月 18日 水曜日 06:20:22 JST)
- Software Tools
- Ubuntu, fish shell, Vim, ROS
- Programming
- C, C++, Python
- MATLAB, Simulink
- OpenCV, PyTorch
- Autoware
- dSPACE (Real-time controller, Embeded System)
- Mechatronics
||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
Using Tool: Mechatronics
=======
Using Tool: Mechatronics
>>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)- 3DCAD (SolidEdge, SOLIDWORKS, Fusion360)
- 3D printing, CNC machining, Laser cutting
=======
- Software Tools
- Ubuntu, fish shell, vim, ROS
- Programming
- C, C++, Python
- MATLAB, Simulink
- OpenCV, PyTorch
- Autoware
- dSPACE (Real-time controller, Embeded System)
- Mechatronics
||||||| parent of 7d21ccb (rebuilding site 2020年 12月 14日 月曜日 01:22:54 JST)
Using Tool
- Software Tools
- Ubuntu, fish shell, vim, ROS
- Programming
- C, C++, Python
- MATLAB, Simulink
- OpenCV, PyTorch
- Autoware
- dSPACE (Real-time controller, Embeded System)
- Mechatronics
=======
Using Tool: Mechatronics
>>>>>>> 7d21ccb (rebuilding site 2020年 12月 14日 月曜日 01:22:54 JST)- 3DCAD (SolidEdge, SOLIDWORKS, Fusion360)
- 3D printing, CNC machining, Laser cutting <<<<<<< HEAD
>>>>>>> 4eff4ae (rebuilding site 2020年 11月 18日 水曜日 06:20:22 JST)
||||||| parent of 7d21ccb (rebuilding site 2020年 12月 14日 月曜日 01:22:54 JST)
=======
- Software Tools
- Ubuntu, fish shell
- VSCode, vim
- C, C++, Python
- MATLAB, Simulink
- ROS, OpenCV, PyTorch, Autoware
- dSPACE (Real-time controller, Embeded System)
- ロボットやサーバの自動化
- サッカー
- 旅行
- 歴史:三国志、戦国時代
- 音楽:梶浦由記
- ゲーム >>>>>>> 7d21ccb (rebuilding site 2020年 12月 14日 月曜日 01:22:54 JST)
- Github ||||||| parent of 9365ac5 (rebuilding site 2020年 8月 28日 金曜日 00:13:28 JST)
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, and Masatoshi Ishikawa: Adaptive Visual Shock Absorber with Visual-based Maxwell Model Using Magnetic Gear, The 2020 International Conference on Robotics and Automation (ICRA2020) (Paris, 2020.06.02), Proceedings, pp. 6163-6168.
- Satoshi Tanaka, Taku Senoo, and Masatoshi Ishikawa: Non-Stop Handover of Parcel to Airborne UAV Based on High-Speed Visual Object Tracking, 2019 19th International Conference on Advanced Robotics (ICAR) (Belo Horizonte, 2019.12.03), Proceedings, pp. 414-419.
- Satoshi Tanaka, Taku Senoo, and Masatoshi Ishikawa: High-speed UAV Delivery System with Non-Stop Parcel Handover Using High-speed Visual Control, 2019 IEEE Intelligent Transportation Systems Conference (ITSC19) (Auckland, 2019.10.30), Proceedings, pp. 4449-4455.
- 田中 敬,小山 佳祐,妹尾 拓,石川 正俊:高速・低摩擦・トルクリミッタ付き小型直動機構Magsliderの開発,第20回計測自動制御学会システムインテグレーション部門講演会(SI2019),講演論文集,pp. 2572 - 2574,2019. [2019年 計測自動制御学会 システムインテグレーション部門 SI2019 優秀講演賞]
- 田中 敬,妹尾 拓,石川 正俊: 高速ビジョンシステムを用いたUAVヘの荷物受け渡しシステムの開発,ロボティクス・メカトロニクス講演会2019(ROBOMECH2019),講演論文集,2P2-I06,2019.
- 田中 敬,妹尾 拓,石川 正俊: 高速アクティブビジョンを用いたマルチカメラトラッキングシステム,第19回計測自動制御学会システムインテグレーション部門講演会(SI2018)講演論文集,pp. 3002 - 3005 ,2018.
- 田中 敬,小林 由弥,小谷 潔,神保 泰彦: 環境情報と複合現実を組み込んだBrain-Computer Interfaceの構築 電気学会医用・生体工学研究会,MBE-18-024,2018.
- 2019年 計測自動制御学会 システムインテグレーション部門 SI2019 優秀講演賞
- 2019⁄04-2020⁄03 (1年間) トヨタ・ドワンゴ高度人工知能人材奨学金 採択
- 2018⁄04-2019⁄03 (1年間) トヨタ・ドワンゴ高度人工知能人材奨学金 採択
- 2016⁄04-2018⁄03 (2年間) 里見奨学会奨学金 採択
- under construction
- ABUロボコン2016年大会チームリーダー
- 国内大会優勝,世界大会ベスト4・ABUロボコン大賞受賞
- Maker Faire Tokyo 2017 出展, GUGEN2017 出展
 =======
||||||| parent of dc8421d (rebuilding site 2020年 10月 1日 木曜日 01:06:35 JST)
=======
=======
||||||| parent of dc8421d (rebuilding site 2020年 10月 1日 木曜日 01:06:35 JST)
=======
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. . >>>>>>> dc8421d (rebuilding site 2020年 10月 1日 木曜日 01:06:35 JST) ||||||| parent of 4ab2a52 (rebuilding site 2020年 11月 18日 水曜日 05:39:20 JST)
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. . =======
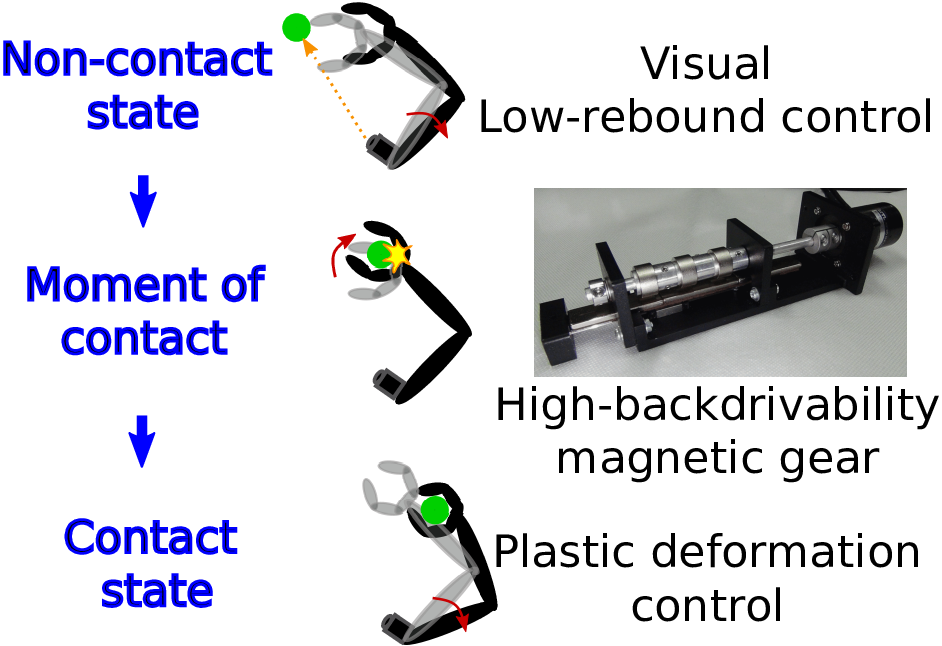
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. 9137 - 9143. 2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award >>>>>>> 4ab2a52 (rebuilding site 2020年 11月 18日 水曜日 05:39:20 JST) ||||||| parent of 3633bea (rebuilding site 2020年 11月 18日 水曜日 05:42:46 JST)
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. 9137 - 9143. 2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award =======
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. 9137 - 9143. [2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award] >>>>>>> 3633bea (rebuilding site 2020年 11月 18日 水曜日 05:42:46 JST) ||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. 9137 - 9143. [2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award] =======
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. 9137 - 9143. [2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award] >>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, and Masatoshi Ishikawa: Adaptive Visual Shock Absorber with Visual-based Maxwell Model Using Magnetic Gear, The 2020 International Conference on Robotics and Automation (ICRA2020) (Paris, 2020.06.02), Proceedings, pp. 6163-6168.
- Satoshi Tanaka, Taku Senoo, and Masatoshi Ishikawa: Non-Stop Handover of Parcel to Airborne UAV Based on High-Speed Visual Object Tracking, 2019 19th International Conference on Advanced Robotics (ICAR) (Belo Horizonte, 2019.12.03), Proceedings, pp. 414-419.
- Satoshi Tanaka, Taku Senoo, and Masatoshi Ishikawa: High-speed UAV Delivery System with Non-Stop Parcel Handover Using High-speed Visual Control, 2019 IEEE Intelligent Transportation Systems Conference (ITSC19) (Auckland, 2019.10.30), Proceedings, pp. 4449-4455.
- 田中 敬,小山 佳祐,妹尾 拓,石川 正俊:高速・低摩擦・トルクリミッタ付き小型直動機構Magsliderの開発,第20回計測自動制御学会システムインテグレーション部門講演会(SI2019),講演論文集,pp. 2572 - 2574,2019. [2019年 計測自動制御学会 システムインテグレーション部門 SI2019 優秀講演賞]
- 田中 敬,妹尾 拓,石川 正俊: 高速ビジョンシステムを用いたUAVヘの荷物受け渡しシステムの開発,ロボティクス・メカトロニクス講演会2019(ROBOMECH2019),講演論文集,2P2-I06,2019.
- 田中 敬,妹尾 拓,石川 正俊: 高速アクティブビジョンを用いたマルチカメラトラッキングシステム,第19回計測自動制御学会システムインテグレーション部門講演会(SI2018)講演論文集,pp. 3002 - 3005 ,2018.
- 田中 敬,小林 由弥,小谷 潔,神保 泰彦: 環境情報と複合現実を組み込んだBrain-Computer Interfaceの構築 電気学会医用・生体工学研究会,MBE-18-024,2018.
- 2020年 IEEE Robotics and Automation Society Japan Joint Chapter Young Award
- 2019年 計測自動制御学会 システムインテグレーション部門 SI2019 優秀講演賞
- 2019/04-2020/03 (1年間) トヨタ・ドワンゴ高度人工知能人材奨学金 採択
- 2018/04-2019/03 (1年間) トヨタ・ドワンゴ高度人工知能人材奨学金 採択
- 2016/04-2018/03 (2年間) 里見奨学会奨学金 採択
- ROBOMECH 2019 参加報告 2019.06.25
- Accepted at IROS2020 [2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award]
- Accepted at ICRA2020
- Accepted at ITSC2019
- ABUロボコン2016年大会チームリーダー
- 国内大会優勝,世界大会ベスト4・ABUロボコン大賞受賞
- Maker Faire Tokyo 2017 出展, GUGEN2017 出展
>>>>>>> 9365ac5 (rebuilding site 2020年 8月 28日 金曜日 00:13:28 JST)
||||||| parent of e7818a2 (rebuilding site 2021年 2月 28日 日曜日 21:14:41 JST)
- Maker Faire Tokyo 2017 出展, GUGEN2017 出展
=======
- Maker Faire Tokyo 2017 出展, GUGEN2017 出展 >>>>>>> e7818a2 (rebuilding site 2021年 2月 28日 日曜日 21:14:41 JST)
-
=======
-
>>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
Biography
Profile
<<<<<<< HEAD >>>>>>> 7d21ccb (rebuilding site 2020年 12月 14日 月曜日 01:22:54 JST) ||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST) ======= >>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)Work Experience
Academic Background
Activity
Interest
Using Tool: Software Tools
Hobby
Contacts
||||||| parent of 9365ac5 (rebuilding site 2020年 8月 28日 金曜日 00:13:28 JST)Publication
国際学会
======= ||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST) ======= >>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)Publication
国際学会 (First Author)
<<<<<<< HEAD >>>>>>> 9365ac5 (rebuilding site 2020年 8月 28日 金曜日 00:13:28 JST) ||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST) ======= >>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)-
<<<<<<< HEAD
<<<<<<< HEAD
<<<<<<< HEAD
<<<<<<< HEAD
<<<<<<< HEAD
国内学会
受賞・奨学金関係
Project
【研究】磁石歯車を用いた直動機構”Magslider”による高速衝撃吸収制御
【研究】無人航空機ヘの高速荷物受け渡しシステムの開発
【研究】Mixed Realityを用いたBrain-Computer Interfaceの開発
ロボットコンテスト
CAD用マウス
国内学会 (First Author)
受賞・奨学金関係
Article
Project
【研究】磁石歯車グリッパ"Magripper"による高速グラスピング
【研究】磁石歯車スライダ"Magslider"による高速衝撃吸収制御
【研究】無人航空機ヘの高速荷物受け渡しシステムの開発
ロボットコンテスト
CAD用マウス
-
<<<<<<< HEAD