Biography
Profile
- Name: Satoshi Tanaka <<<<<<< HEAD
- Apr. 2020 - Now Tier IV, Inc. Autonomous Driving Perception Algorithms Engineer
- Autonomous Driving Perception Algorithms Engineer
Work Experience
- Apr. 2020 - Now Tier IV, Inc. Autonomous Driving Sensing/Perception Engineer
- Internship
- Apr. 2018 - Apr. 2019, Internship at Preferred Networks, Inc. as a part-time engineer
- Aug. 2017 - Mar. 2018, Internship at Hitachi, Ltd as a research assistant
Academic Background
-
<<<<<<< HEAD
- Master’s Degree in Information Science and Rngineering ||||||| parent of 4ab2a52 (rebuilding site 2020年 11月 18日 水曜日 05:39:20 JST)
- Master’s Degree in Information Science and Engineering =======
- Master’s Degree in Information Science and Engineering, the University of Tokyo
<<<<<<< HEAD
>>>>>>> 4ab2a52 (rebuilding site 2020年 11月 18日 水曜日 05:39:20 JST)
||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
=======
>>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
- Apr. 2018 - Mar. 2020, Ishikawa Senoo Lab, Department of Creative Informatics, Graduate School of Information Science and Technology
- Bachelor’s Degree in Precision Engineering, the University of Tokyo
-
<<<<<<< HEAD
- Apr. 2014 - Mar. 2018 Dept. of Precison Engineering, The University of Tokyo
- Apr. 2017 - Mar. 2018 Kotani Lab, Research Center for Advanced Sceience and Technology <<<<<<< HEAD ||||||| parent of 4ab2a52 (rebuilding site 2020年 11月 18日 水曜日 05:39:20 JST)
- Apr. 2016 - Mar. 2018 Dept. of Precison Engineering, The University of Tokyo
- Apr. 2014 - Mar. 2016 Faculty of Liberal Arts =======
- Apr. 2016 - Mar. 2018 Dept. of Precison Engineering
- Apr. 2014 - Mar. 2016 Faculty of Liberal Arts >>>>>>> 4ab2a52 (rebuilding site 2020年 11月 18日 水曜日 05:39:20 JST) ||||||| parent of 1a084ad (rebuilding site 2020年 12月 13日 日曜日 13:28:01 JST)
- Apr. 2017 - Mar. 2018 Kotani Lab, Research Center for Advanced Sceience and Technology
- Apr. 2016 - Mar. 2018 Dept. of Precison Engineering
- Apr. 2014 - Mar. 2016 Faculty of Liberal Arts =======
- Apr. 2017 - Mar. 2018, Kotani Lab, Research Center for Advanced Sceience and Technology
- Apr. 2016 - Mar. 2018, Dept. of Precison Engineering
- Apr. 2014 - Mar. 2016, Faculty of Liberal Arts <<<<<<< HEAD >>>>>>> 1a084ad (rebuilding site 2020年 12月 13日 日曜日 13:28:01 JST)
||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
Activity
Interest
-
<<<<<<< HEAD
<<<<<<< HEAD
- Robotics, Perception, Computer Vision
- High-speed Robotics ||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
- Robotics, Perception, Computer Vision, Control theory
- High-speed Robotics
- System integration of high-speed robot using 1000fps high-speed image processing
- Deformation Control, robot force control for dynamic manipulation with high speediness
- Application of high-speed visual control for logistics, Unmanned Aerial Vehicle(UAV)
=======
- Robotics, Perception, Computer Vision, Control theory
- High-speed Robotics
- System integration of high-speed robot using 1000fps high-speed image processing
- Deformation Control, robot force control for dynamic manipulation with high speediness
- Application of high-speed visual control for logistics, Unmanned Aerial Vehicle(UAV) >>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
Project
||||||| parent of 4ab2a52 (rebuilding site 2020年 11月 18日 水曜日 05:39:20 JST) - Robotics, Perception, Computer Vision
- High-speed Robotics =======
- Robotics, Perception, Computer Vision, Control theory
- High-speed Robotics
>>>>>>> 4ab2a52 (rebuilding site 2020年 11月 18日 水曜日 05:39:20 JST)
- (Research) Publication
- Robotic Competition
- Team Leader for ABU Robocon2016, winner of National Championships, 2nd-runnerup of ABU Robocon, ABU Robocon award.
- Mouse for CAD
- Maker Faire Tokyo 2017, GUGEN2017
- Interest
Using Tool
-
<<<<<<< HEAD
- Linux (Ubuntu)
- Vim
- C++, Python
- CAD (SolidEdge, SOLIDWORKS, Fusion360) ||||||| parent of 4eff4ae (rebuilding site 2020年 11月 18日 水曜日 06:20:22 JST)
- Software Tools
- Ubuntu, fish shell, Vim, ROS
- Programming
- C, C++, Python
- MATLAB, Simulink
- OpenCV, PyTorch
- Autoware
- dSPACE (Real-time controller, Embeded System)
- Mechatronics
- 3DCAD (SolidEdge, SOLIDWORKS, Fusion360)
- 3D printing, CNC machining, Laser cutting
=======
- Software Tools
- Ubuntu, fish shell, vim, ROS
- Programming
- C, C++, Python
- MATLAB, Simulink
- OpenCV, PyTorch
- Autoware
- dSPACE (Real-time controller, Embeded System)
- Mechatronics
||||||| parent of 1a084ad (rebuilding site 2020年 12月 13日 日曜日 13:28:01 JST)
Using Tool
- Software Tools
- Ubuntu, fish shell, vim, ROS
- Programming
- C, C++, Python
- MATLAB, Simulink
- OpenCV, PyTorch
- Autoware
- dSPACE (Real-time controller, Embeded System)
- Mechatronics ======= ||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST) =======
Using Tool: Mechatronics
<<<<<<< HEAD >>>>>>> 1a084ad (rebuilding site 2020年 12月 13日 日曜日 13:28:01 JST) ||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST) ======= >>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)- 3DCAD (SolidEdge, SOLIDWORKS, Fusion360)
- 3D printing, CNC machining, Laser cutting
Using Tool: Software Tools
- Ubuntu, fish shell
- VSCode, vim
- C, C++, Python
- MATLAB, Simulink
- ROS, OpenCV, PyTorch, Autoware
- dSPACE (Real-time controller, Embeded System)
Hobby
-
<<<<<<< HEAD
- Automation
- robotics, server
<<<<<<< HEAD
>>>>>>> 4eff4ae (rebuilding site 2020年 11月 18日 水曜日 06:20:22 JST)
||||||| parent of 1a084ad (rebuilding site 2020年 12月 13日 日曜日 13:28:01 JST)
=======
||||||| parent of 7d21ccb (rebuilding site 2020年 12月 14日 月曜日 01:22:54 JST)
- Automation
- robotics, server
=======
- Automation: Robotics, Server >>>>>>> 7d21ccb (rebuilding site 2020年 12月 14日 月曜日 01:22:54 JST)
- Soccer
- Travel
- History: Romance of the Three Kingdoms, provincial wars in Japan
- Music: Yuki Kajiura
- Video Game >>>>>>> 1a084ad (rebuilding site 2020年 12月 13日 日曜日 13:28:01 JST)
Contacts
||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)Publication
International Conference (First Author)
=======Publication
International Conference (First Author)
>>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)-
<<<<<<< HEAD
<<<<<<< HEAD
<<<<<<< HEAD
<<<<<<< HEAD
<<<<<<< HEAD
- Github ||||||| parent of 9365ac5 (rebuilding site 2020年 8月 28日 金曜日 00:13:28 JST)
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, and Masatoshi Ishikawa: Adaptive Visual Shock Absorber with Visual-based Maxwell Model Using Magnetic Gear, The 2020 International Conference on Robotics and Automation (ICRA2020) (Paris, 2020.06.02), Proceedings, pp.6163-6168.
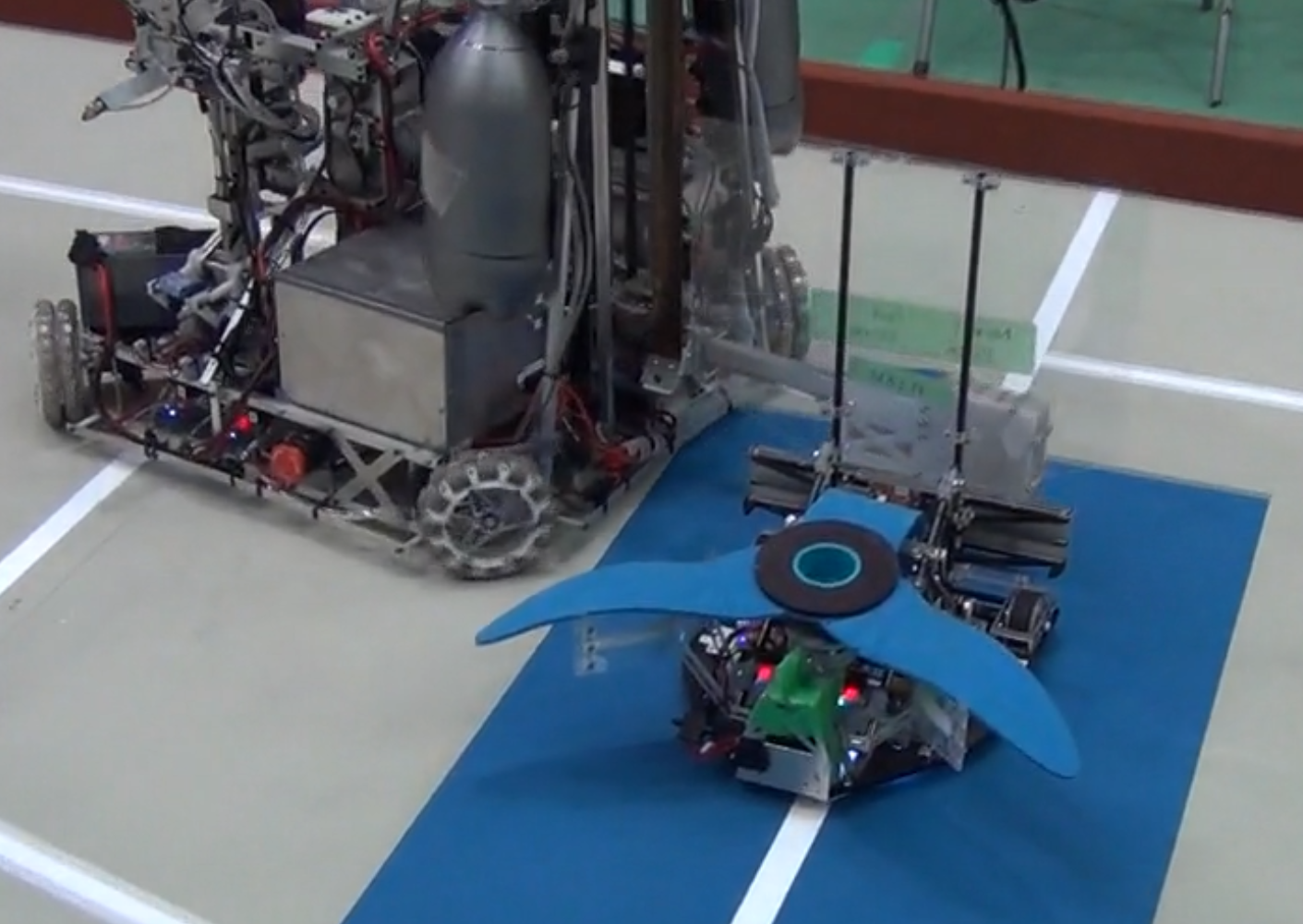
- Satoshi Tanaka, Taku Senoo, and Masatoshi Ishikawa: Non-Stop Handover of Parcel to Airborne UAV Based on High-Speed Visual Object Tracking, 2019 19th International Conference on Advanced Robotics (ICAR) (Belo Horizonte, 2019.12.03), Proceedings, pp. 414-419.
- Satoshi Tanaka, Taku Senoo, and Masatoshi Ishikawa: High-speed UAV Delivery System with Non-Stop Parcel Handover Using High-speed Visual Control, 2019 IEEE Intelligent Transportation Systems Conference (ITSC19) (Auckland, 2019.10.30), Proceedings, pp. 4449-4455. ======= ||||||| parent of dc8421d (rebuilding site 2020年 10月 1日 木曜日 01:06:35 JST) =======
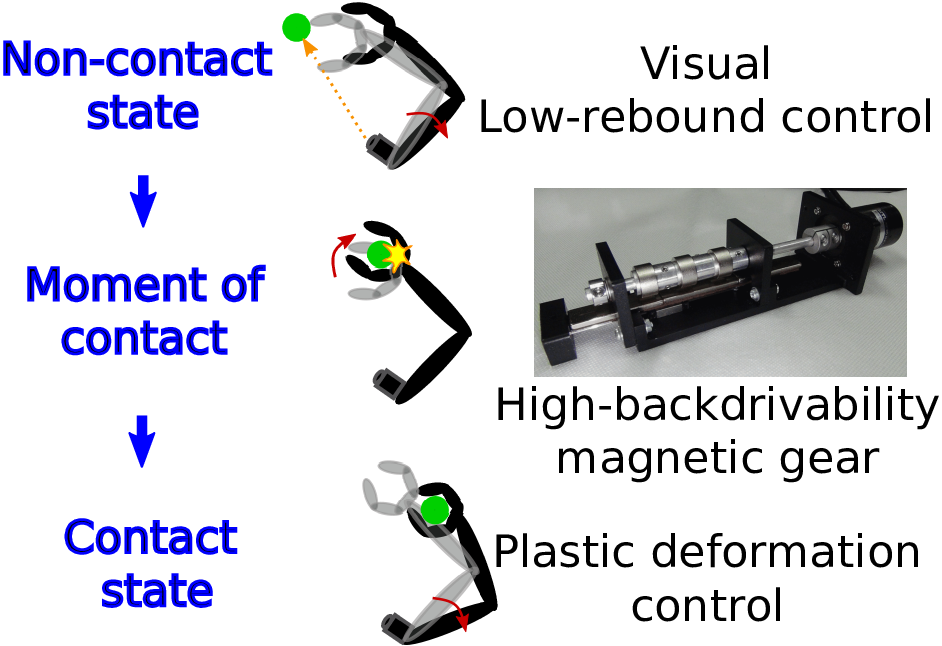
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. . >>>>>>> dc8421d (rebuilding site 2020年 10月 1日 木曜日 01:06:35 JST) ||||||| parent of 4ab2a52 (rebuilding site 2020年 11月 18日 水曜日 05:39:20 JST)
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. . =======
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. 9137 - 9143. 2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award >>>>>>> 4ab2a52 (rebuilding site 2020年 11月 18日 水曜日 05:39:20 JST) ||||||| parent of 9d5994c (rebuilding site 2020年 11月 18日 水曜日 05:42:24 JST)
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. 9137 - 9143. 2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award =======
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. 9137 - 9143. [2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award] >>>>>>> 9d5994c (rebuilding site 2020年 11月 18日 水曜日 05:42:24 JST) ||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. 9137 - 9143. [2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award] =======
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. 9137 - 9143. [2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award] >>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, and Masatoshi Ishikawa: Adaptive Visual Shock Absorber with Visual-based Maxwell Model Using Magnetic Gear, The 2020 International Conference on Robotics and Automation (ICRA2020) (Paris, 2020.06.02), Proceedings, pp.6163-6168.
- Satoshi Tanaka, Taku Senoo, and Masatoshi Ishikawa: Non-Stop Handover of Parcel to Airborne UAV Based on High-Speed Visual Object Tracking, 2019 19th International Conference on Advanced Robotics (ICAR) (Belo Horizonte, 2019.12.03), Proceedings, pp. 414-419.
- Satoshi Tanaka, Taku Senoo, and Masatoshi Ishikawa: High-speed UAV Delivery System with Non-Stop Parcel Handover Using High-speed Visual Control, 2019 IEEE Intelligent Transportation Systems Conference (ITSC19) (Auckland, 2019.10.30), Proceedings, pp. 4449-4455.
Award, Scholarship
- 2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award
- 2019/04-2020/03 (1 year) Toyota Dowango scholarship for advanced artifical intelligence researcher
- 2018/04-2019/03 (1 year) Toyota Dowango scholarship for advanced artifical intelligence researcher
Media
<<<<<<< HEADMedia
- Software Tools
IEEE Spectrum “High-Speed Robot Arm Hands Off Package to Delivery Drone” 2020.05.22
>>>>>>> 9365ac5 (rebuilding site 2020年 8月 28日 金曜日 00:13:28 JST)
||||||| parent of 0c86aa2 (rebuilding site Wed Sep 16 01:57:24 JST 2020)
Media
IEEE Spectrum “High-Speed Robot Arm Hands Off Package to Delivery Drone” 2020.05.22
=======
- IEEE Spectrum “High-Speed Robot Arm Hands Off Package to Delivery Drone” 2020.05.22 >>>>>>> 0c86aa2 (rebuilding site Wed Sep 16 01:57:24 JST 2020)
- under construction
- Team Leader for ABU Robocon2016, winner of National Championships, 2nd-runnerup of ABU Robocon, ABU Robocon award.
- Maker Faire Tokyo 2017, GUGEN2017
- Accepted at IROS2020 [2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award]
- Accepted at ICRA2020
- Accepted at ITSC2019
- Team Leader for ABU Robocon2016
- Winner of National Championships, 2nd-runnerup of ABU Robocon, ABU Robocon award.
- Maker Faire Tokyo 2017, GUGEN2017
Project
(Research) Adaptive Visual Shock Absorber with Magslider
(Research) High-speed supply station for UAV delivery system
(Research) Brain-Computer Interface using Mixed Reality
Robotic Competition
Mouse for CAD

Media
======= >>>>>>> b91568e (rebuilding site 2020年 12月 18日 金曜日 01:35:38 JST) ||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST) ======= >>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)Project
(Research) High-speed Hitting Grasping with Magripper
(Research) Adaptive Visual Shock Absorber with Magslider
(Research) High-speed supply station for UAV delivery system
Robotic Competition
Mouse for CAD
>>>>>>> e7818a2 (rebuilding site 2021年 2月 28日 日曜日 21:14:41 JST) ||||||| parent of d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)
======= >>>>>>> d230fc9 (rebuilding site 2021年 8月 4日 水曜日 06:14:28 JST)