For Japanese
Biography
Profile
- Name: Satoshi Tanaka
- X: @scepter914
- Github: @scepter914
- Linkedin: @scepter914
Work Experience
- Aug. 2025 - Freelance engineer
- Apr. 2020 - Jul. 2025, TIER IV, Inc.
- Jun. 2024 - Jul. 2025 Lead Software Engineer for MLOps in perception module
- Apr. 2020 - Dec. 2023 Software Engineer for Autonomous Driving
- Internship
- Apr. 2018 - Apr. 2019, Internship at Preferred Networks, Inc. as a part-time engineer
- Aug. 2017 - Mar. 2018, Internship at Hitachi, Ltd as a research assistant
Academic Background
- Master’s Degree in Information Science and Engineering, the University of Tokyo
- Apr. 2018 - Mar. 2020, Ishikawa Senoo Lab, Department of Creative Informatics, Graduate School of Information Science and Technology
- Bachelor’s Degree in Precision Engineering, the University of Tokyo
- Apr. 2017 - Mar. 2018, Kotani Lab, Research Center for Advanced Sceience and Technology
- Apr. 2016 - Mar. 2018, Dept. of Precison Engineering
- Apr. 2014 - Mar. 2016, Faculty of Liberal Arts
Interest
- Robotics, Computer Vision, Control Theory
- Building autonomous robotic systems that can interact with the physical world faster and more dexterously than humans
- Real-time 3D object detection
- Development of mechanisms capable of fast and compliant motion
- Force control for dynamic manipulation
Publication
International Conference (First author)
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa, High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020), Proceedings, pp. 9137 - 9143. [2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award]
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, and Masatoshi Ishikawa, Adaptive Visual Shock Absorber with Visual-based Maxwell Model Using Magnetic Gear, The 2020 International Conference on Robotics and Automation (ICRA2020), Proceedings, pp. 6163-6168.
- Satoshi Tanaka, Taku Senoo, and Masatoshi Ishikawa, Non-Stop Handover of Parcel to Airborne UAV Based on High-Speed Visual Object Tracking, 2019 19th International Conference on Advanced Robotics (ICAR2019), Proceedings, pp. 414-419.
- Satoshi Tanaka, Taku Senoo, and Masatoshi Ishikawa, High-speed UAV Delivery System with Non-Stop Parcel Handover Using High-speed Visual Control, 2019 IEEE Intelligent Transportation Systems Conference (ITSC19), Proceedings, pp. 4449-4455.
ArXiv papers (First author)
- Satoshi Tanaka*, Kok Seang Tan*, Isamu Yamashita, Domain Adaptation for Different Sensor Configurations in 3D Object Detection, arXiv 2025, https://arxiv.org/abs/2509.04711.
- Satoshi Tanaka, Koji Minoda, Fumiya Watanabe, Takamasa Horibe, Rethink 3D Object Detection from Physical World, arXiv 2025, https://arxiv.org/abs/2507.00190.
- Satoshi Tanaka, Samrat Thapa, Kok Seang Tan, Amadeusz Szymko, Lobos Kenzo, Koji Minoda, Shintaro Tomie, Kotaro Uetake, Guolong Zhang, Isamu Yamashita, Takamasa Horibe, AWML: An Open-Source ML-based Robotics Perception Framework to Deploy for ROS-based Autonomous Driving Software, arXiv 2025, https://arxiv.org/abs/2506.00645.
International Conference (Not first author)
- Taisei Fujimoto, Satoshi Tanaka, and Shinpei Kato, LaneFusion: 3D Object Detection with Rasterized Lane Map, the 2022 33rd IEEE Intelligent Vehicles Symposium (IV 2022), Proceedings, pp. 396-403.
Other publication
- Kazunari Kawabata, Manato Hirabayashi, David Wong, Satoshi Tanaka, Akihito Ohsato AD perception and applications using automotive HDR cameras, the 4th Autoware workshop at the 2022 33rd IEEE Intelligent Vehicles Symposium (IV 2022)
Award, Scholarship
- 2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award
- 2019/04-2020/03 (1 year) Toyota Dowango scholarship for advanced artifical intelligence researcher
- 2018/04-2019/03 (1 year) Toyota Dowango scholarship for advanced artifical intelligence researcher
Projects
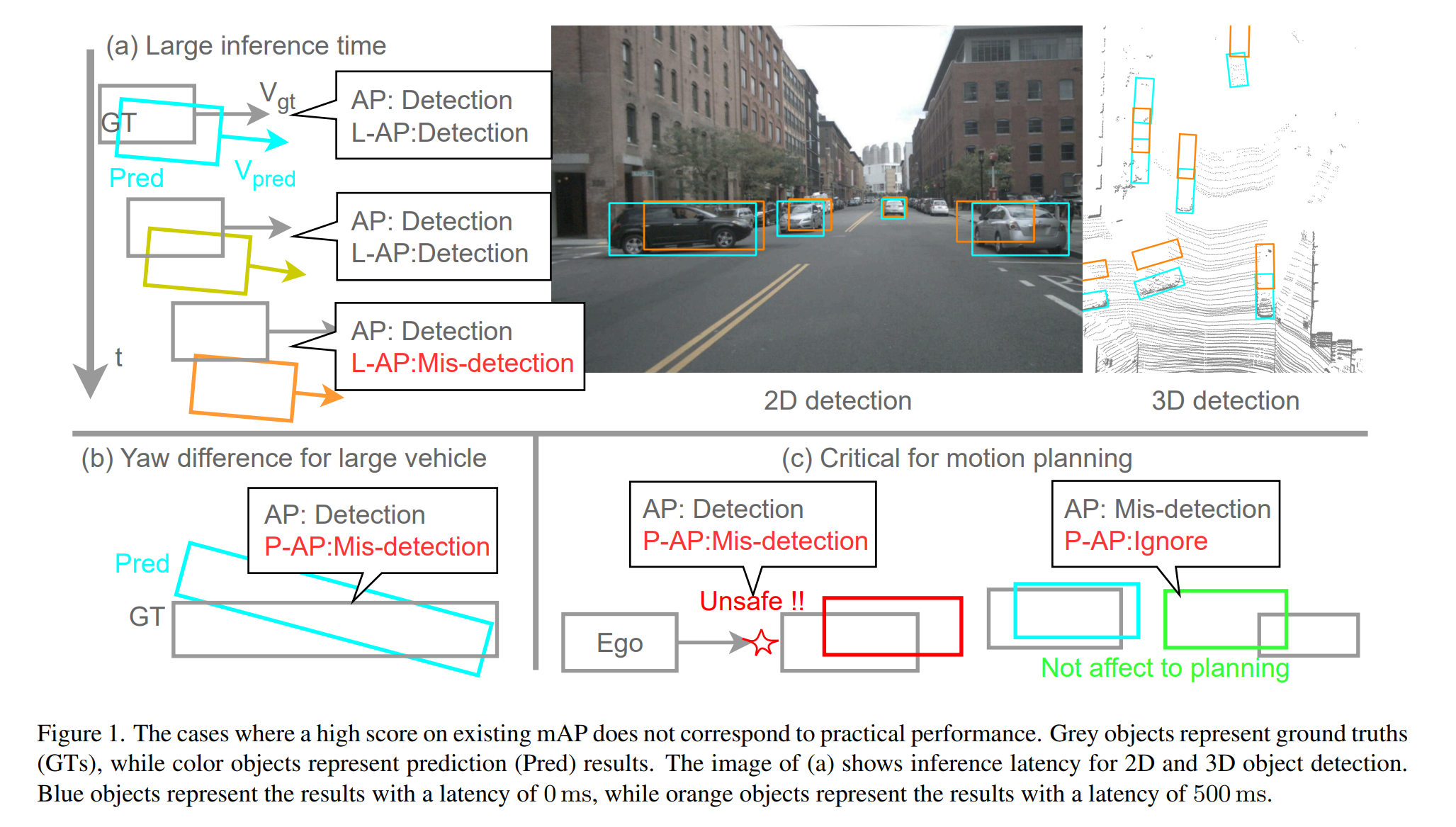
(Research) Rethink 3D Object Detection from Physical World
- https://arxiv.org/abs/2507.00190
- Developed new metrics for real-time 3D object detection
AWML
- https://github.com/tier4/AWML
- Developed an OSS ML-based robotics perception framework to deploy for ROS-based autonomous driving software

DepthAnything-ROS
- https://github.com/scepter914/DepthAnything-ROS
- Made prototype ROS2 package of DepthAnything with TensorRT C++.
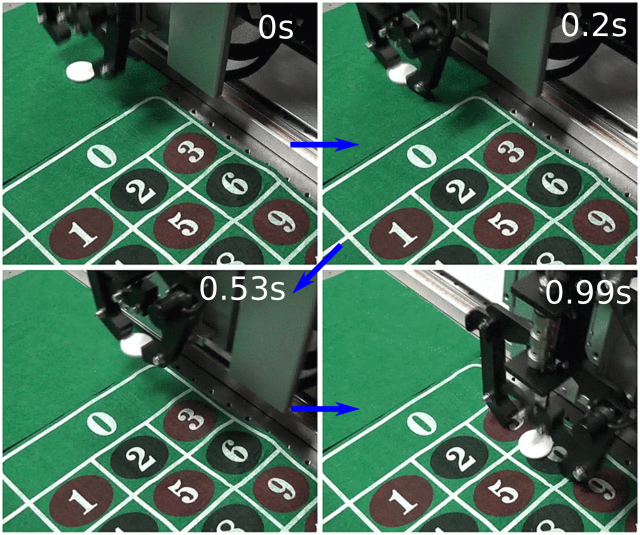
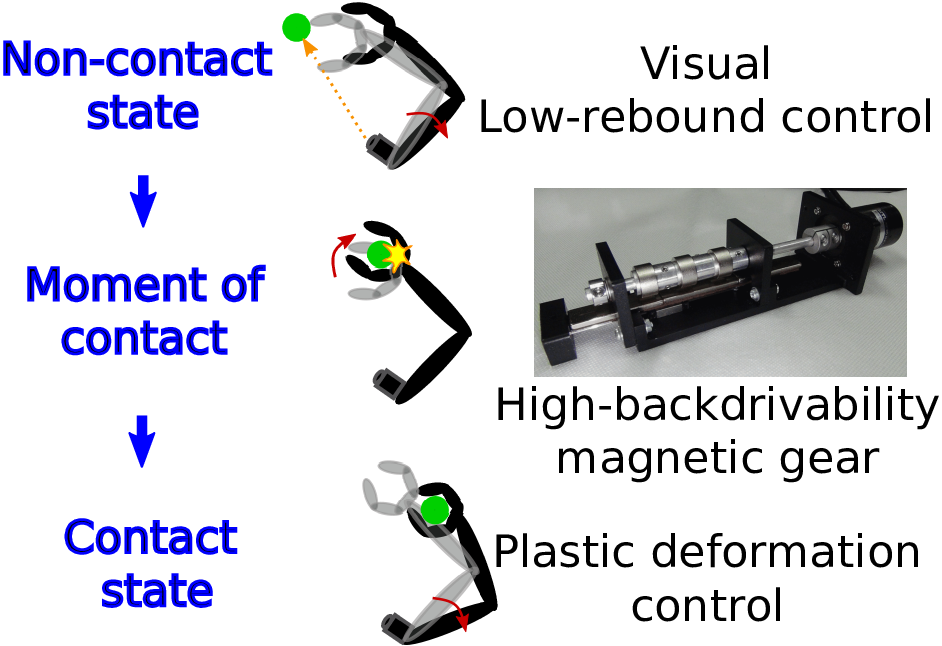
(Research) High-speed Hitting Grasping with Magripper
- Developed high-speed hitting grasping executed seamlessly from reaching with Magripper, a highly backdrivable gripper, and hitting grasping, high-speed grasping framework.
- Accepted at IROS2020 [2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award]
(Research) Adaptive Visual Shock Absorber with Magslider
- Developed visual shock absorber system with high-speed vision, high-backdrivablilty hardware, and force control.
- Accepted at ICRA2020
(Research) High-speed supply station for UAV delivery system
- Developed high-speed supply station for UAV delivery system
- Accepted at ITSC2019
Robotic Competition
- Team Leader for ABU Robocon2016
- Winner of National Championships, 2nd-runnerup of ABU Robocon, ABU Robocon award.
- Visited to the prime minister’s residence as the team leader of representation from Japan team. Reported by link and link.

Other projects
- mmCarrot
- https://github.com/scepter914/mmcarrot
- Made useful tools for MMlab libraries
- (Research) LaneFusion: 3d detection with HD map
- Researched 3D object detection with HD map
- Accepted at IV2022
- Mouse for CAD
- Maker Faire Tokyo 2017, GUGEN2017
- Youtube link